拉格朗日乘数法(Lagrange multiplier)有很直观的几何意义。
举个2维的例子来说明:
假设有自变量x和y,给定约束条件g(x,y)=c,要求f(x,y)在约束g下的极值。
我们可以画出f的等高线图,如下图。此时,约束g=c由于只有一个自由度,因此也是图中的一条曲线(红色曲线所示)。显然地,当约束曲线g=c与某一条等高线f=d1相切时,函数f取得极值。
两曲线相切等价于两曲线在切点处拥有共线的法向量。因此可得函数f(x,y)与g(x,y)在切点处的梯度(gradient)成正比。
于是我们便可以列出方程组求解切点的坐标(x,y),进而得到函数f的极值。

想法就是:
能够碰到极大极小值点的必要条件是:
梯度场与切空间垂直,也就是梯度场不能够有任何流形切空间上的分量,否则在切空间方向有分量,在流形上沿分量方向走,函数值会增加,沿反方向走,函数值会减少,不可能为局部极小或者极大值点。
一.
一个基本的例子:
假设你生活在三维欧氏空间中,z方向的坐标数值上代表海拔高度。
如果你会飞,那么anyway,你想飞多高飞多高,所以你的海拔可以任意高也可以任意小,根本就没有最大值。
假定你是一个普通人类,你在一座山
当你真正到达山腰时,很容易“只缘身在此山中,不识此山真面目”,这时候如何判断是真的在往上爬呢,还是在往下走呢?
在肉眼所能看见的小范围内,你可以通过周边的局部地形来判断,假设它大概是这样:
你就知道应该往高处(大概为红箭头方向)走,而不是绿箭头方向。
当然不一定一直沿这个方向直线式上升,可能还需要走到某个地方,再次做一下这种局部的考察,调整一下方向,保证自己能向高处走。
不过,什么是“高”的一边?这个概念究竟是如何形成的?
我们知道,海拔,我们希望能够找到山面上的海拔最高点(山顶)。
梯度
关于梯度一个很自然的结论就是:
沿梯度方向是f增长最快的方向,反方向是下降最快的方向。
所以直观上沿与梯度方向成锐角的方向移动,那么f的值应该会增加。
而在山面上,我们可以通过天空来确定梯度方向(当然指向高高的天空啦)
与垂直向上方向成锐角的方向的地形,也就是“高”的一边。

(可以见到,红色的角是锐角,所以沿此方向海拔上升,绿色的角是钝角,所以沿此方向海拔下降)
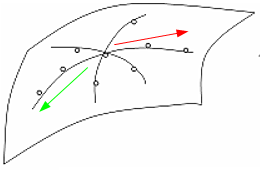
所有我们可以移动的方向,叫做这一点的切空间。
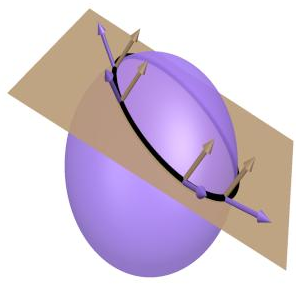
那么,什么时候才能知道我们到达了山顶呢?
P点为山顶,那么在这一点,切空间上任何一个方向与梯度方向(红色箭头)的夹角都不可以是锐角,
否则我们沿那个方向爬,就会上升到更高点。
所以切空间只能够与梯度方向垂直。
利用流形本身的信息,我们可以得到切空间的方程,从而确定与切空间垂直的所有方向(这种方向叫做法向)。
利用函数本身的信息,我们可以得到梯度场的方向
梯度场方向与切空间垂直,所以梯度场可以表成一些的特定的法向 的线性组合,
系数记为
即,这就是Laplace乘子法的思想
二.一般形式
给一组约束条件,
(经常加一些好的条件比如说的jacobi矩阵满秩,这些条件都是为了让M确实是一个流形,见正则值定理)
那么流形(约束条件下的所有点)为
p如果为的局部极大值或者局部极小值,
那么
,故法向量由
张成
所以存在一组系数
使得
这就是乘子方程。
(PS:所以本质上就是最开始说的:
能够碰到极大极小值点的必要条件是:
梯度场与切空间垂直,也就是梯度场不能够有任何流形切空间上的分量,否则在切空间方向有分量,在流形上沿分量方向走,函数值会增加,沿反方向走,函数值会减少,不可能为局部极小或者极大值点。
利用流形本身的信息,我们可以得到切空间的方程,从而确定法向。
利用函数本身的信息,我们可以得到梯度场的方向
梯度场方向与切空间垂直,所以梯度场可以表成一些的特定的法向(比如说一组基法向)的线性组合
用这两个信息把上面那句话用方程的形式写出来就好了
后记:
1.这种乘子法只考虑了第一变分(梯度),事实上极大极小值还可以用Hessian矩阵进行二阶刻画,所谓第二变分
2.这种找法只能够找局部极值点,如果要寻找鞍点,就是这样的点: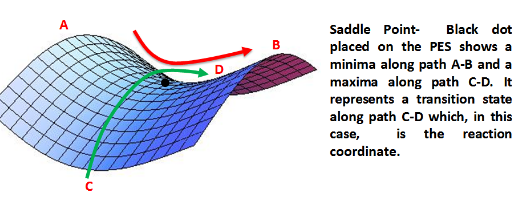
这种方法完全失效,不过一般情况下我们只关心极大极小值点。
对于鞍点的寻找,我们有Moutain Pass Lemma,或者更一般的,我们可以采用min-max原理的推理,能够从极值点出发找到可能鞍点。
3.我们只考虑假定流形M上比较好的函数,所有上述方法都可以内蕴地在流形上建立起来。
对于一般的关于临界点即
比如说著名的Reeb定理是在说:
考虑一个紧无边光滑流形M,如果M上存在一个光滑函数,它只有最大值和最小值两个极值点,并且这两点的Hessian矩阵均可逆,那么M就会拓扑同胚于单位球面
(微分同胚是不一定的,见Minlor的7维怪球)
所有临界点均不退化(即Hessian矩阵非退化)的光滑函数f叫做Morse函数,对于Morse函数f,我们有
,M是一个光滑紧无边流形,右边是M的欧拉示性数,左边跑遍f的所有临界点,ind表示临界点的指标。
,即f的指标为i的临界点至少有
个,
作为一个应用,可以得到

环面上任何一个Morse函数,至少有四个临界点。
为什么出现拉格朗日乘子法?
- 最短路径问题
- 从几何意义中获得灵感:
- 从数学公式中获得灵感
- 推广到高维空间
------------------------------------------------------
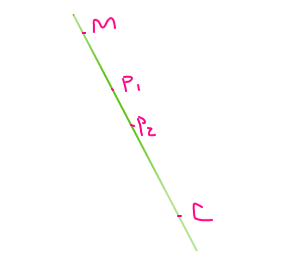
一个最短路径问题

假设你在M点,需要先到河边(上图右侧曲线 )再回到C点,如何规划路线最短?
假设:
河流曲线满足方程 g(x,y) = 0 (例如 如果它是一个圆: )
用P表示河边上的任意P(x,y)点,
用d(M,P)表示M,P之间距离,
那么问题可以描述为: , 约束于
如何求解问题?
1. 从几何意义中获得灵感:
首先,f(P)是一个标量(只有大小没有方向),那么在上图的二维空间中必然存在了一个标量场f(P),即对于每一个点P都对应着一个f(P)值,它代表经过该点的路径总和是多少。
如果我们画出它的等值线(场线),就会发现它呈椭圆向外辐射:

显然,f(P)的等值线与河边曲线的交点P即为我们想求的点。
那么问题来了: 这样的点满足何种性质? (如果没有性质也就无法列出关系式进行求解,但是这么特殊的点极有可能存在良好某种特性)
最直观的性质: 等值线(椭圆)在P点的法向量n与河边曲线的法向量m平行:

而在多元微积分中,一个函数h在某一点P的梯度是点P所在等值线(二维)或等值面(三维)的法向量,即,所以对于函数 f , g : (注意 梯度是一个向量,准备在另一个问题中对梯度的概念做详细阐述)
即由相交点的性质我们得到了2个关系式(因为是二维平面,对于三维则可以得到三个关系式,以此类推),
再加上我们的约束条件:
2. 从数学公式中获得灵感
仍人是问题:
我们知道在多元微积分中如果想求一个函数的极值一般的做法是把 ,如何把这个公式和我们的约束条件
统一在一起呢?
答案是: 引入 并且定义一个新的函数:
,
令: 与我们要求解的优化问题是 等价的:
因为: 与约束条件等价,而且此时
即拉格朗日函数
与我们的目标函数
取相同值。 用拉格朗日函数把目标函数和约束条件统一在了一起。
实际上这种方法与上面的几何方法是完全等价的:
3. 推广到高维空间
以上我们一直在讨论 二维的情形,下面让我们看看这个问题的高维情况: 以几何观点为例:
对于我们的目标函数 ,下图中红色椭球是它的等值面。它与黑色环的交点
,此处的向量
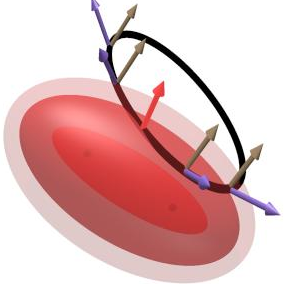
更高维度同理。
参考:
- An Introduction to Lagrange Multipliers
作者:卢健龙
链接:https://www.zhihu.com/question/38586401/answer/105273125
作者:陆zz
链接:https://www.zhihu.com/question/38586401/answer/105400458
作者:晓雷
链接:https://www.zhihu.com/question/38586401/answer/122745294
作者:灵剑
链接:https://www.zhihu.com/question/38586401/answer/105272615
来源:知乎