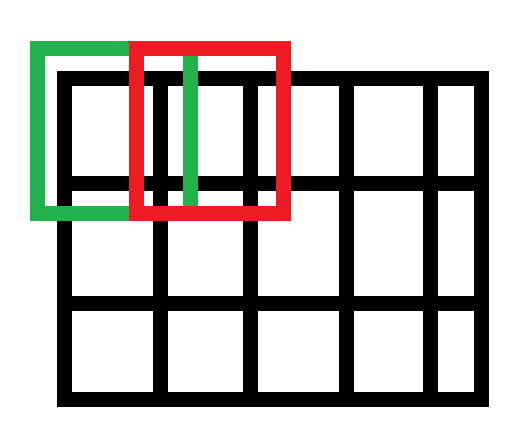
加入边缘判定,<2则加2。
if (x_upleft<2)
x_upleft=x_upleft+2;
if (y_upleft<2)
y_upleft=y_upleft+2;
HRESULT RotateZoom(PBYTE pbSrc,int iWidth,int iHeight,double dbRotate,double dbZoom,PBYTE pbTag) { //int phase[17]={0};//8相位,包含端点存在17个距离 //16 //for (int i=0;i<17;i++) //{ // double i2=1.0*i; // phase[i]=fs(i2/8)*1024; //} int phase[17]={1024,987,888,745,576,399,232,93,0,-49,-72,-75,-64,-45,-24,-7,0}; int src1x,src1y,src2x,src2y,src3x,src3y,src4x,src4y; int drcx[4],drcy[4]; int angl=724;//旋转45度 int middle_height=1024; int middle_width=1280; int rx=640; int ry=512; int newheight=1640; int newwidth=1640; int rx0=820; //插值放大后图像的旋转中心 int ry0=820; for(int y=0;y<512;y=y+32) { for(int x=0;x<640;x=x+32) { //正向映射入大图像中分块图像所对应的像素点 src1x=x;src1y=y;src2x=x+31;src2y=y;src3x=x;src3y=y+31;src4x=x+31;src4y=y+31; //正向映射公式 int a=dbZoom; drcx[0]=(a*src1x-rx)*angl+(a*src1y-ry)*angl+rx0*1024; drcy[0]=-(a*src1x-rx)*angl+(a*src1y-ry)*angl+ry0*1024; drcx[1]=(a*src2x-rx)*angl+(a*src2y-ry)*angl+rx0*1024; drcy[1]=-(a*src2x-rx)*angl+(a*src2y-ry)*angl+ry0*1024; drcx[2]=(a*src3x-rx)*angl+(a*src3y-ry)*angl+rx0*1024; drcy[2]=-(a*src3x-rx)*angl+(a*src3y-ry)*angl+ry0*1024; drcx[3]=(a*src4x-rx)*angl+(a*src4y-ry)*angl+rx0*1024; drcy[3]=-(a*src4x-rx)*angl+(a*src4y-ry)*angl+ry0*1024; //获得分块图像大范围 drcx[0]=(int)(drcx[0]/1024);//截后10位处理? drcy[0]=(int)(drcy[0]/1024); drcx[1]=(int)(drcx[1]/1024); drcy[1]=(int)(drcy[1]/1024); drcx[2]=(int)(drcx[2]/1024); drcy[2]=(int)(drcy[2]/1024); drcx[3]=(int)(drcx[3]/1024); drcy[3]=(int)(drcy[3]/1024); //放大二倍有边框,不旋转时+1可处理 int max_x,max_y,min_x,min_y; int srcx,srcy; max_x=drcx[0];max_y=drcy[0];min_x=drcx[0];min_y=drcy[0]; for (int i=0;i<4;i++) { if (min_x>drcx[i]) min_x=drcx[i]; if (min_y>drcy[i]) min_y=drcy[i]; } min_x=min_x-1;min_y=min_y-1; for (int i=0;i<4;i++) { if (max_x<drcx[i]) max_x=drcx[i]; if (max_y<drcy[i]) max_y=drcy[i]; } max_x=min_x+96-1;max_y=max_y+1; //将范围内的点映射回原图中 同时旋转插值 for (int j=min_y;j<=max_y;j++) { for (int i=min_x;i<=max_x;i++) { //将点映射回原图中 srcx=((i-rx0)*angl-(j-ry0)*angl+rx*1024)/2048; srcy=((i-rx0)*angl+(j-ry0)*angl+ry*1024)/2048; if ((srcx>=x-2)&&(srcx<=x+33)&&(srcy>=y-2)&&(srcy<=y+33)&&(srcx>=2)&&(srcy>=2)&&(srcx<=iWidth-2)&&(srcy<=iHeight-2))/*&&(i>=0)&&(j>=0)*/ { //映射后位置判断区别可能有误 //if(srcx>x+31) //{ // srcx=x+31; //} //if(srcy>y+31) //{ // srcy=y+31; //} //if(srcx<x-1) //{ // srcx=x-1; //} //if(srcy<y-1) //{ // srcy=y-1; //} //插值: //计算整数部分和小数部分 int xOr = floor((double)srcx); int yOr = floor((double)srcy); double u=srcx-xOr; double v=srcy-yOr; //查表双三插值 int phasex=8*u;//8相位 int phasey=8*v; int A1,B1,C1,D1,A2,B2,C2,D2; //计算每个点的插值系数 A1=phase[8+phasex];B1=phase[phasex];C1=phase[8-phasex];D1=phase[16-phasex]; A2=phase[8+phasey];B2=phase[phasey];C2=phase[8-phasey];D2=phase[16-phasey]; //由src计算块编号,使用对应编号块内的相对位置 int xnum,ynum; int x_upleft,y_upleft;//左上起始点坐标 int x_shift,y_shift; xnum=floor(srcx/32.0)+1; ynum=floor(srcy/32.0)+1; x_upleft=(xnum-1)*32; y_upleft=(ynum-1)*32; if (x_upleft<2) x_upleft=x_upleft+2; if (y_upleft<2) y_upleft=y_upleft+2; int imgsrc[1296]={255};//36*36=1296,32*32 int ijk=0; //存入分块 for (int n=0;n<36;n++) { for (int m=0;m<36;m++) { imgsrc[ijk]=pbSrc[(y_upleft-2+n)*iWidth+x_upleft-2+m]; ijk++; } } //块内相对偏移位置,u和v代表的相位偏移量不用变 x_shift= xOr-x_upleft+2; y_shift= yOr-y_upleft+2; //int middle=imgsrc[(y_shift)*36+(x_shift)]*B1*B2+imgsrc[(y_shift+1)*36+(x_shift)]*B1*C2+imgsrc[(y_shift+2)*36+(x_shift)]*B1*D2; int middle=imgsrc[(y_shift-1)*36+(x_shift-1)]*A1*A2+imgsrc[(y_shift)*36+(x_shift-1)]*A1*B2+imgsrc[(y_shift+1)*36+(x_shift-1)]*A1*C2+imgsrc[(y_shift+2)*36+(x_shift-1)]*A1*D2+ imgsrc[(y_shift-1)*36+(x_shift)]*B1*A2+imgsrc[(y_shift)*36+(x_shift)]*B1*B2+imgsrc[(y_shift+1)*36+(x_shift)]*B1*C2+imgsrc[(y_shift+2)*36+(x_shift)]*B1*D2+ imgsrc[(y_shift-1)*36+(x_shift+1)]*C1*A2+imgsrc[(y_shift)*36+(x_shift+1)]*C1*B2+imgsrc[(y_shift+1)*36+(x_shift+1)]*C1*C2+imgsrc[(y_shift+2)*36+(x_shift+1)]*C1*D2+ imgsrc[(y_shift-1)*36+(x_shift+2)]*D1*A2+imgsrc[(y_shift)*36+(x_shift+2)]*D1*B2+imgsrc[(y_shift+1)*36+(x_shift+2)]*D1*C2+imgsrc[(y_shift+2)*36+(x_shift+2)]*D1*D2; /*imgsrc[(yOr-1)*iWidth+(xOr-1)]*A1*A2+imgsrc[(yOr)*iWidth+(xOr-1)]*A1*B2+imgsrc[(yOr+1)*iWidth+(xOr-1)]*A1*C2+imgsrc[(yOr+2)*iWidth+(xOr-1)]*A1*D2+ imgsrc[(yOr-1)*iWidth+(xOr)]*B1*A2+imgsrc[(yOr)*iWidth+(xOr)]*B1*B2+imgsrc[(yOr+1)*iWidth+(xOr)]*B1*C2+imgsrc[(yOr+2)*iWidth+(xOr)]*B1*D2+ imgsrc[(yOr-1)*iWidth+(xOr+1)]*C1*A2+imgsrc[(yOr)*iWidth+(xOr+1)]*C1*B2+imgsrc[(yOr+1)*iWidth+(xOr+1)]*C1*C2+imgsrc[(yOr+2)*iWidth+(xOr+1)]*C1*D2+ imgsrc[(yOr-1)*iWidth+(xOr+2)]*D1*A2+imgsrc[(yOr)*iWidth+(xOr+2)]*D1*B2+imgsrc[(yOr+1)*iWidth+(xOr+2)]*D1*C2+imgsrc[(yOr+2)*iWidth+(xOr+2)]*D1*D2;*/ /*int middle=pbSrc[(yOr-1)*iWidth+(xOr-1)]*A1*A2+pbSrc[(yOr)*iWidth+(xOr-1)]*A1*B2+pbSrc[(yOr+1)*iWidth+(xOr-1)]*A1*C2+pbSrc[(yOr+2)*iWidth+(xOr-1)]*A1*D2+ pbSrc[(yOr-1)*iWidth+(xOr)]*B1*A2+pbSrc[(yOr)*iWidth+(xOr)]*B1*B2+pbSrc[(yOr+1)*iWidth+(xOr)]*B1*C2+pbSrc[(yOr+2)*iWidth+(xOr)]*B1*D2+ pbSrc[(yOr-1)*iWidth+(xOr+1)]*C1*A2+pbSrc[(yOr)*iWidth+(xOr+1)]*C1*B2+pbSrc[(yOr+1)*iWidth+(xOr+1)]*C1*C2+pbSrc[(yOr+2)*iWidth+(xOr+1)]*C1*D2+ pbSrc[(yOr-1)*iWidth+(xOr+2)]*D1*A2+pbSrc[(yOr)*iWidth+(xOr+2)]*D1*B2+pbSrc[(yOr+1)*iWidth+(xOr+2)]*D1*C2+pbSrc[(yOr+2)*iWidth+(xOr+2)]*D1*D2; */ middle=middle/(1024*1024); if(middle<=255&&middle>=0) pbTag[j*newwidth+i]=middle; else if(middle>255) pbTag[j*newwidth+i]=255; else pbTag[j*newwidth+i]=0; } } } } } return ERROR_SUCCESS; }