参考 http://blog.csdn.net/u013453604/article/details/49102957 的博客,其实这些内容和 《开源机器人操作系统》 这本书差不多。
具体的步骤我就不多说了,,不过我这里是在QT 中开发的,,个人觉得还是很方便的。。
这里就讲一下我遇到的问题,
------在编写好 .cpp 之后,我按照自己的理解修改了 CMakeLists.txt 文件,,但总是会出现一个错误:
[rosrun] Couldn't find executable named。。。。。。。。。
这个信息的意思是:没有catkin_make 这个节点文件,
但是我反复试了好几次catkin_make,,在QT试了,,也在终端中试了,,但还是不行,,
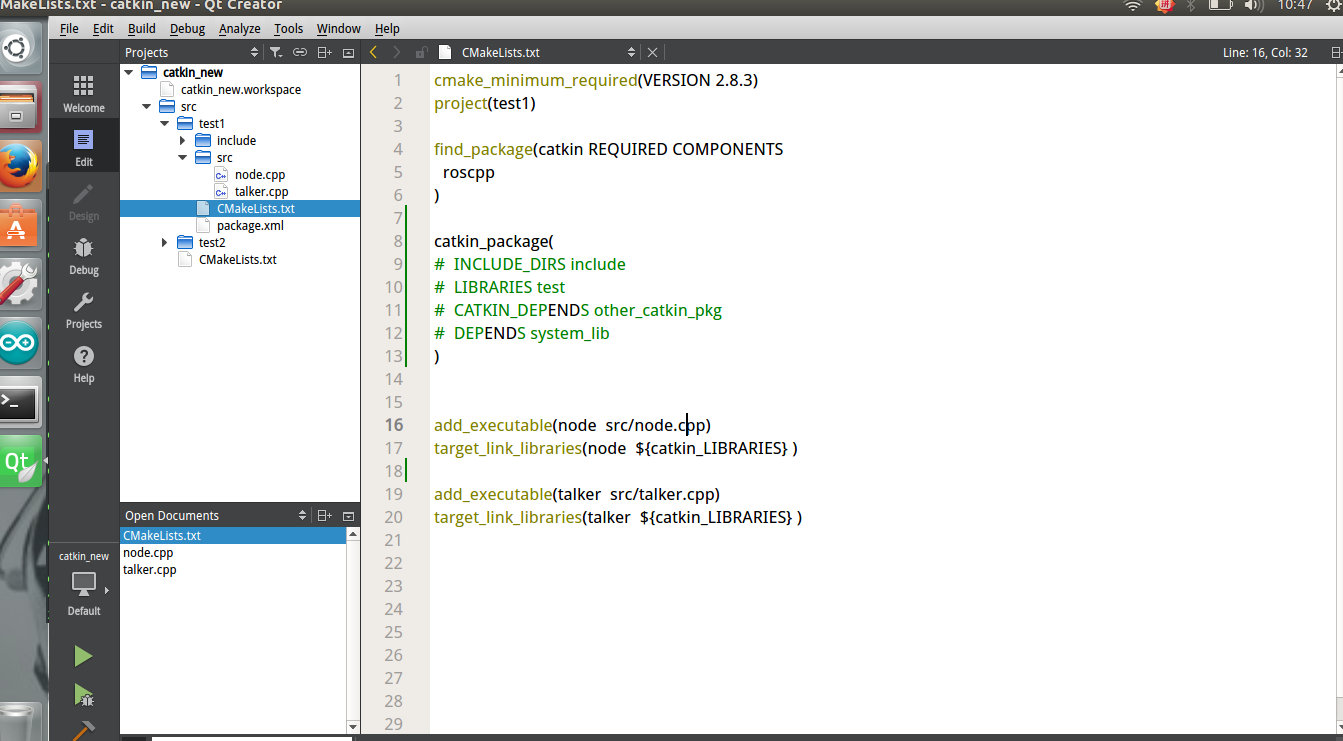
所以我就好好的查看 CMakeLists.txt 文件 ,,果然,,我把下面的内容给删掉了:
1 catkin_package( 2 # INCLUDE_DIRS include 3 # LIBRARIES test 4 # CATKIN_DEPENDS other_catkin_pkg 5 # DEPENDS system_lib 6 )
加上这个之后就好了。。。。。
但这几句是什么意思呢?
[function defined in catkin_package.cmake]
应该是在工作空间中定义需要 catkin_make 的包,,如果没有这个的话,,catkin_make 就找不到要编译的包
这是我个人理解,,不知道正确与否,,还希望大神能够指出我的错误。。。。。
附上截图
哈