这段时间刚开始接触Matlab中的Simulink仿真,我就结合自己的专业,利用Simulink进行了无刷直流电机的仿真,因为Simulink工具箱里面有很多可用的模块,所以建模过程变得非常简单。
在Matlab界面中new->model之后,找到Simulink Library Browser,这里面有系统自带的很多模块,接下来我们就需要找到自己所需要的模块了,了解无刷直流电机的工作原理以后,接下来就是找到直流电源、三相逆变桥、无刷直流电机模型。而Simulink中也有这些模型,可以直接通过搜索关键字找到它们,分别是DC Voltage Source、Universal Bridge、Permanent Magnetic Synchronous Machine。接下来就是需要将相应的信号连接起来,如下图
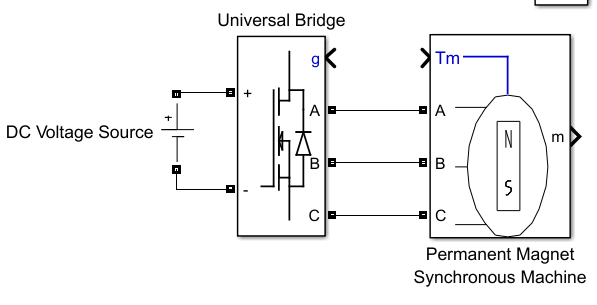
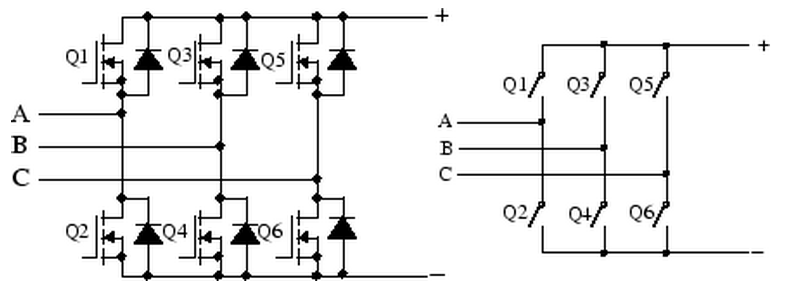
其中,直流端电压可以设置电压大小,逆变桥可以选择开关器件类型,我们这里选择Mosfet,PMSM中我们将反电势波形选择trapezoidal即梯形波,电机参数相电阻、相电感、反电势常数、极对数按实际值设置。Universal Bridge对应如下桥式拓扑结构。
然后就是添加相应的负载Tm,这里可以模拟突加负载和突减负载以及任意变化的负载,通过给定一个函数就可以。然后就是开关信号g,下面会详细介绍。模型搭建完成后如下图。
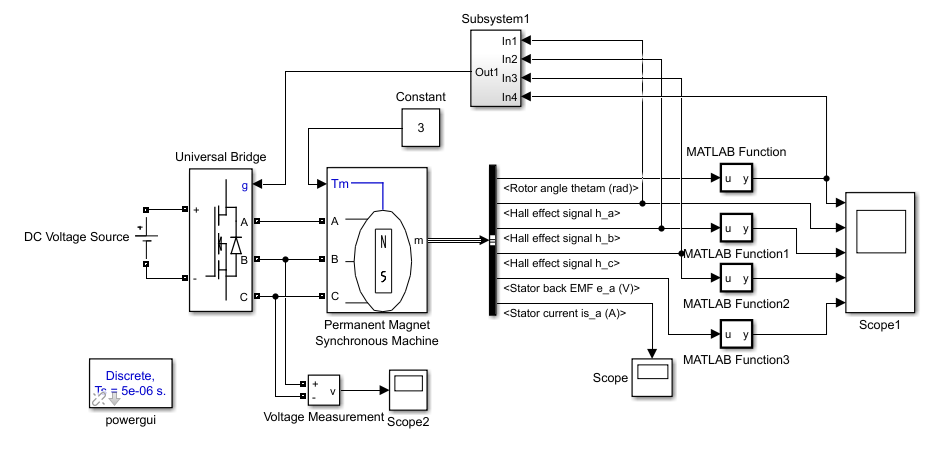
PMSM输出端给的信号通过Bus Selector选择,我们需要使用的是三相霍尔信号得到相应的开关逻辑,这也是该仿真的关键所在,其中整个模型中Subsystem1就是实现开关逻辑的算法。我们可以根据霍尔换相真值表,通过相应的逻辑门实现,但是这样搭建模型显得不灵活而且很累赘,并且不能模拟超前或者滞后换相。所以我这里才用的是通过Matlab Function来实现的。
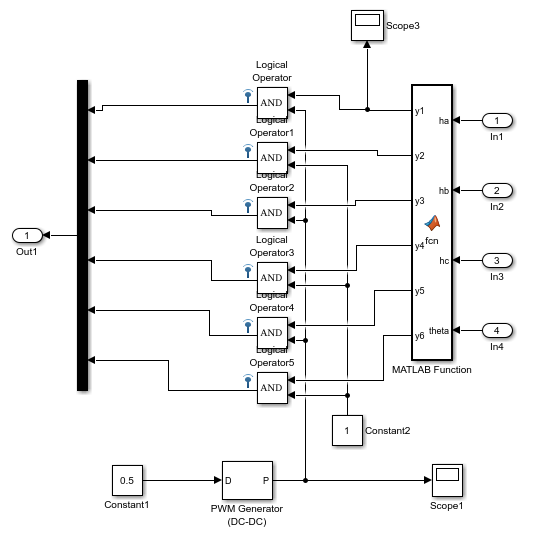
如上图,这是换相逻辑的模型,其中我采用的是下桥臂恒通,上桥臂PWM调制的方式导通Mosfet,目前占空比的给定方式采用的是常数,后续可以根据转速环进行PI给定。换相便是根据换相真值表而来。
|
霍尔信号 |
Mosfet导通真值表 |
导通相 |
|||||||
|
Ha |
Hb |
Hc |
Q1 |
Q2 |
Q3 |
Q4 |
Q5 |
Q6 |
|
|
0 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
CB |
|
0 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
BA |
|
0 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
CA |
|
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
AC |
|
1 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
AB |
|
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
BC |
接下来就是按照真值表编写相应开关逻辑代码,
1 function [y1,y2,y3,y4,y5,y6] = fcn(ha,hb,hc,theta) 2 y1=0;y2=0;y3=0;y4=0;y5=0;y6=0; 3 tmp=hc*4+hb*2+ha; 4 if tmp==4 5 y1=0;y2=0;y3=0;y4=1;y5=1;y6=0; 6 end 7 if tmp==6 8 y1=0;y2=1;y3=0;y4=0;y5=1;y6=0; 9 end 10 if tmp==2 11 y1=0;y2=1;y3=1;y4=0;y5=0;y6=0; 12 end 13 if tmp==3 14 y1=0;y2=0;y3=1;y4=0;y5=0;y6=1; 15 end 16 if tmp==1 17 y1=1;y2=0;y3=0;y4=0;y5=0;y6=1; 18 end 19 if tmp==5 20 y1=1;y2=0;y3=0;y4=1;y5=0;y6=0; 21 end 22 23 end
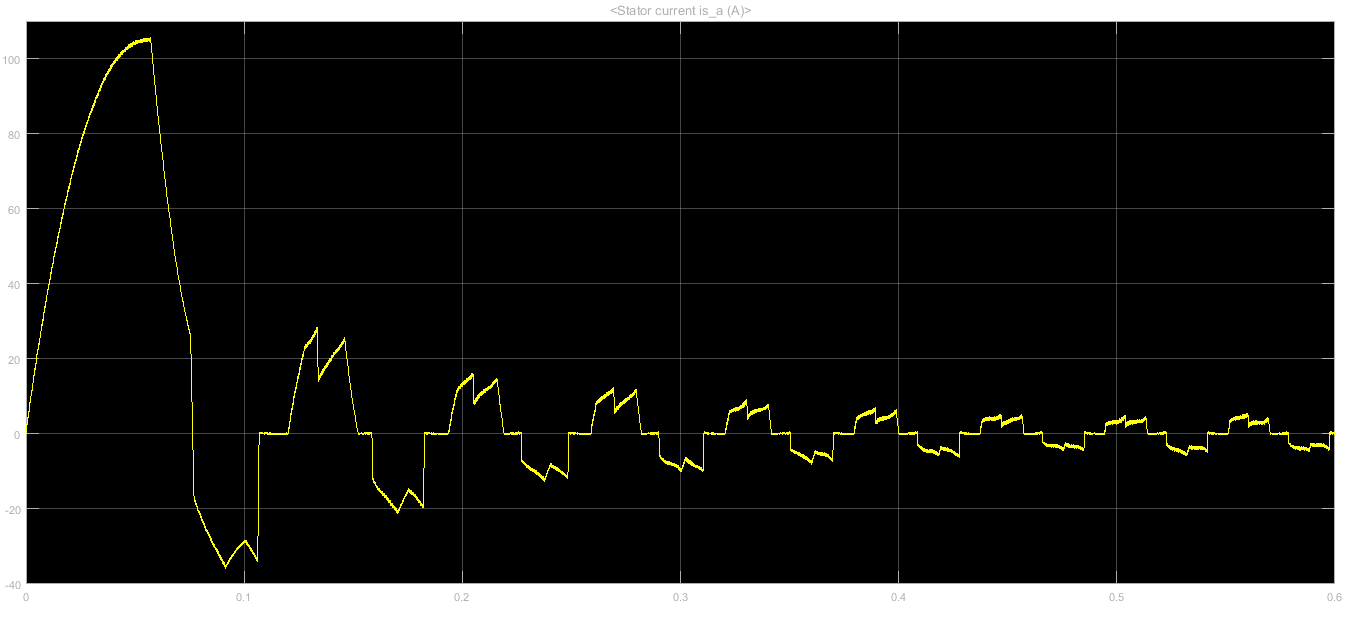
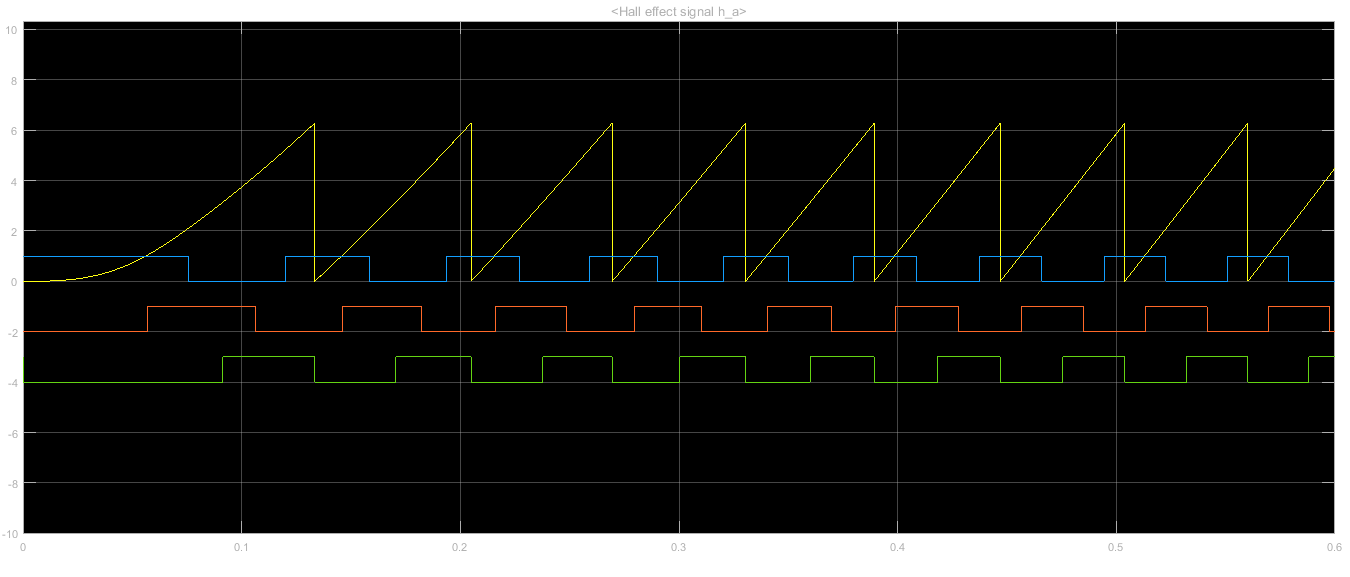
代码添加完成以后,就可以配置Mosfet上下桥臂的导通模式了,我这里采用了上桥臂PWM调制,下桥臂导通的模式,即H_PWM-L_ON方式。一切准备就绪,下面来看仿真结果,A相电流,霍尔信号以及转子机械角度如下图。