该电机的固有机械特性图:
采用PLECS中自带的xyplot构件,将电机转速和电机的电磁转矩分别作为该图表的y、x,得到下图

撷取电机的临界工作点,坐标为(70.72465,112.898),对于三相交流电动机的临界工作点,
有Sm=R2/X20,Tmax=KU2/2X20,但是由于此时转子电阻不满足远小于漏抗这个条件,因此弃用书本上的公式。
n0=60f1/p=1500rpm,
s=1-n/n0,
X20=2πf1LL2=0.79168,
c=1+X1/Xm=1+L1/Lm=1.2975,
使用电磁转矩公式

并且用matlab绘制出机械特性曲线,
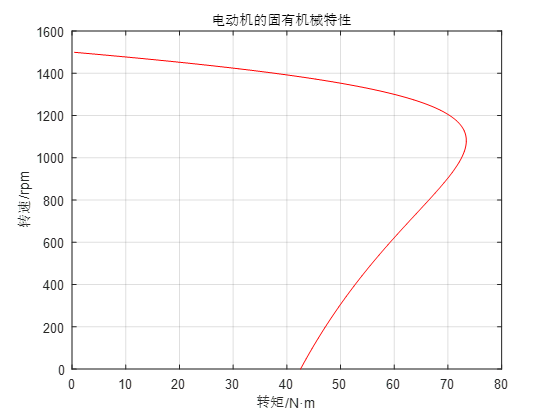
与仿真结果基本一致。
结合本周学习的交流电机原理及启动、调速、制动特性,在PLECS仿真环境下控制上述三相交流异步电机带动起重机起升机构运行
方法:Ⅰ.逐级切除启动电阻启动:控制电机带重物上升,从静止加速到800r/min
采用上式电磁转矩与转速的公式,令n=800rpm,则s=1-n/n0=7/15。
带入求解得到R2=8.1016Ω,串联电阻阻值为7.6936Ω,经过仿真结果优化,将阻值优化为7.1Ω。
Ⅱ.倒拉反接制动:减速到静止,保持静止状态0.5s,
令n=0,则s=1,带入求解得到R串=16.9526Ω。
Ⅲ.电源反接启动(调频调速):带重物下降,从静止达到600r/min
Ⅳ.能耗制动:保持600r/min匀速运动0.6s,减速到静止。

仿真结果:
