背景
Fast R-CNN中的region proposal阶段所采用的SS算法成为了检测网络的速度瓶颈,本文是在Fast R-CNN基础上采用RPN(Region Proposal Networks)代替SS。
方法
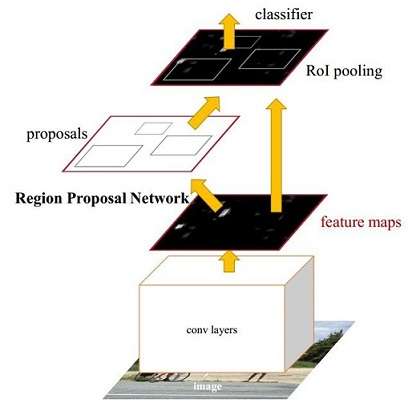
从图中我们可以看到,RPN的输入为最后一个Conv层输出的feature map,输出为一系列ROI,后面的过程就跟Fast R-CNN一样了。
所以在这里我们只需要了解RPN是如何工作的。
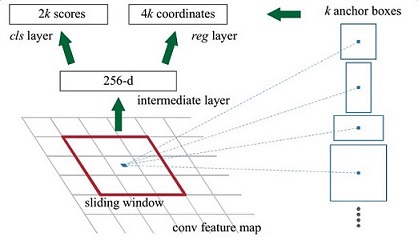
论文里有这样一张图,讲解了RPN的过程(注意后面的k不是千,而是代表每个特征点要预测的anchors个数)。但我觉得可能很多人看到这张图都难以理解,本人也是结合模型的网络结构才理解的,所以我在这里更通俗地解释一下。

论文上的图有点抽象,屏蔽了很多细节部分,初学者看的话可能会似懂非懂,从网络结构上看的话那么RPN的原理就非常清晰了。
假设每个点预测9个Anchor,即k=9
(1)首先,原图片经过一系列卷积,会得到一个feature map,即左下角的256*h*w的FM,作为ROI pooling和RPN的输入;
(2)RPN网络中,256*h*w的FM,先经过256*3*3 Conv+Relu,得到一个新的256*h*w的FM(注意:这里pad=1,所以h和w不变),这个步骤对应论文图中的3*3的sliding window;
(3)新的256*h*w的FM经两个分支,一个是18*1*1 Conv,代表前背景分类分支,输出一个18*h*w的FM,用来预测特征图的每个点所对应的Anchors是为前景还是背景;
(4)另一个是36*1*1 Conv,代表坐标回归分支,输出一个36*h*w的FM,用来预测特征图的每个点所对应的9个Anchors坐标需要调整的大小;
(5)把上面两种预测综合一下,就能得到预测的候选框了,后面的步骤就跟Fast R-CNN一样了。
总结
Faster R-CNN = RPN + Fast R-CNN