作者:桂。
时间:2017-09-29 21:20:18
链接:http://www.cnblogs.com/xingshansi/p/7612984.html
前言
主要分析在解相干算法中,子阵平滑的有效性。
一、前向平滑
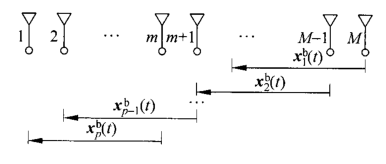
以均匀线阵(ULA)为例,第l个接收阵元的信号为:

其中 ,M为阵元数,N为信号个数。
,M为阵元数,N为信号个数。
以前向平滑为例:
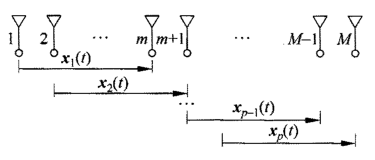
令β =  ,对于第k个子阵有
,对于第k个子阵有

其中D为:

假设信号与噪声不相关,且噪声为白噪声,计算相关矩阵:

前向平滑修正的协方差矩阵:
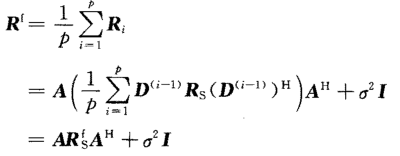
证明:当子阵阵元数m>=N,且当p>=N时,Rf为满秩矩阵。
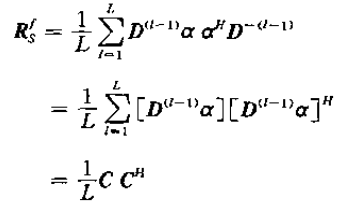
对于相干情况,Rs的秩为1,故可以用矢量相乘的形式表示:
则
显然C与Rsf的秩是一致的。式中
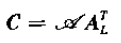
C可进一步表示为
其中
,α为对应信号的幅度,因此该矩阵rank = K
AL是Vandermonde矩阵:
从而有:
进一步得出结论:
得证。




上面的推导是教科书中的推导,以两个子阵、两个信号为例,假设两个子阵的间距为D,对应的A可写为:
虽然具有Vandermonde结构,但即使入射角度不同,上面的矩阵仍然可能出现rank = 1的情况,只要满足(k为整数):

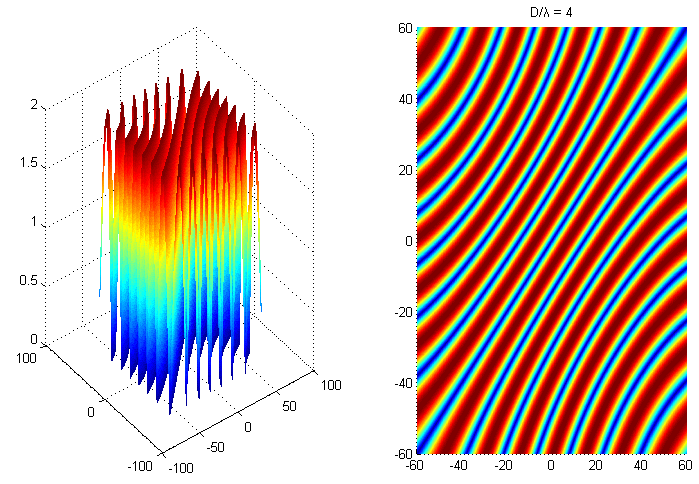
任意取D = 4*λ,theta1、2分别取-60°~60°,仿真结果:
D = 2*λ,进行仿真:
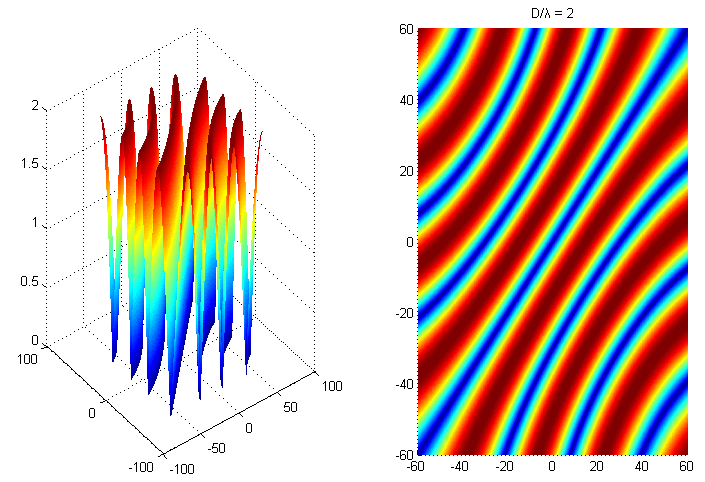
当两个相位差2pi整数倍,如图蓝线所示,此时相关矩阵的秩仍然是亏缺的,此时谱估计解相干失效,这里称蓝色区域为盲区。以MUSIC算法为例,自然也无从谈起矩阵分解以及谱估计。另一方面,D与λ比值的取值越小,则盲区越小。
这个盲区类似:子阵间距(孔径)减小,则相位模糊较少(盲区减少),但分辨率下降;子阵间距增大,则相位模糊增多(盲区增加),对应分辨率提高。
二、后向平滑算法
后向平滑:
子阵信号为:

其中J为交换矩阵。
以第p-k+1个子阵为例:

后向空间平滑修正的相关矩阵为:

得出的性质与前向平滑类似。当子阵阵元数m>=N,且当p>=N时,Rb为满秩矩阵。
三、前后向平滑算法
前后向平滑,即是将前向平滑、后向平滑的相关矩阵累加。
当子阵阵元数m>=N,且当2p>=N时,R为满秩矩阵。这一点仅当子阵结构为中心对称结构才成立。
四、前向、后向、前后向平滑与阵列的关系
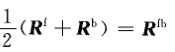
前向平滑可以理解成原始子阵的平滑:
后向平滑则可以理解为镜像对称的虚拟(子阵):
因为到原点的距离由d变为-d,在形式上体现的就是相位相反,也就是接收数据取共轭。顺序就是翻转,因此后向平滑就是前向平滑的共轭+翻转。
假设两个子阵的原始子阵为1、 2,翻转后为1‘,2’,前向平滑就是利用1,2;后向平滑为1‘,2’。前后向平滑为1,1‘,2,2’,由于形式上利用了更多的子阵,因此前后向平滑需要的子阵个数更少。但子阵必须中心对称,即镜像之后与原始子阵结构一致。
五、前后向与非均匀的关系
镜像的思路(即后向平滑),也给了非均匀布阵一些启发。
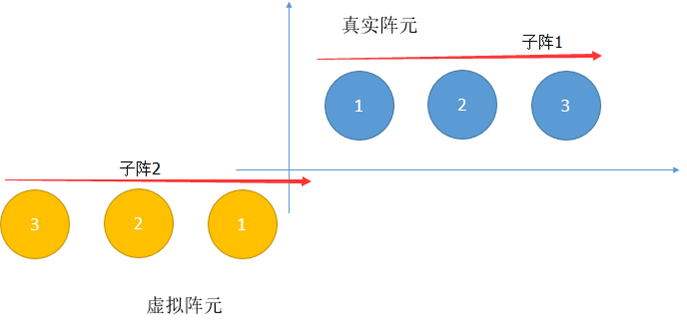
在构造子阵时,如果是一般的子阵,进行copy之后,即可利用空间平滑的思想:
但可以借助镜像特性,进一步节省资源,例如一个5阵元的非均匀线阵:
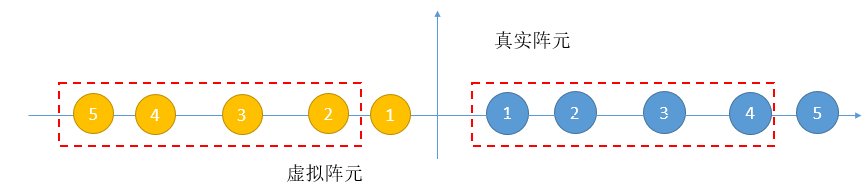
利用镜像的关系,可以得出两个4元的非均匀线阵(红框所示),这就给布阵拓展了思路。
六、非均匀镜像中坐标点的影响
该章节分析,从理论到结论,均错误。
根据上文第一部分的分析,子阵的间距D会造成盲区,且D/λ越大,盲区越大。
对于直接copy的空间平滑子阵思路,一旦子阵确定,子阵间距D也随之确定,因此盲区变得不可控。
而对于镜像的思路,子阵间距D是可控的,这就使得盲区变得相对可控。r对于上面提到的非均匀线阵,取不同的坐标原点:
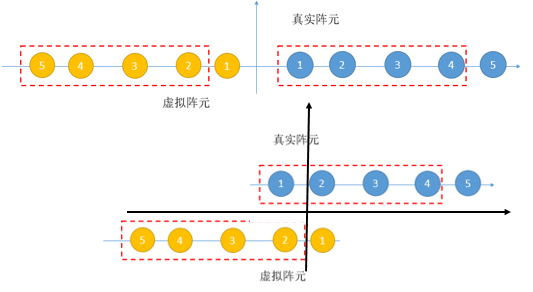
子阵之间的距离也随之改变,对于两个子阵,如果借助镜像的思想,理论上间距D可以取的范围是:0 - +∞。
这里就难免带来一个问题:改变坐标原点,即对应改变导向矢量,近而改变原始的阵列接收数据,可对于阵列来讲,接收的数据是固定不变的。这个可以换一个角度理解:X = AS,改变参考点,调节的是A,在X给定不变的情况下,S是一个相对的信息,尽管改变参考系可以使得盲区减小,但S可能得到的是小信号。一个解决办法是在谱估计(MUSIC为例)时取不同的参考系,假设X给定,从何借助两组数据进行DOA估计(镜像阵列,对于不同参考系,盲区不同。)