一、高斯函数
1. 一维高斯函数
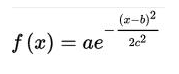
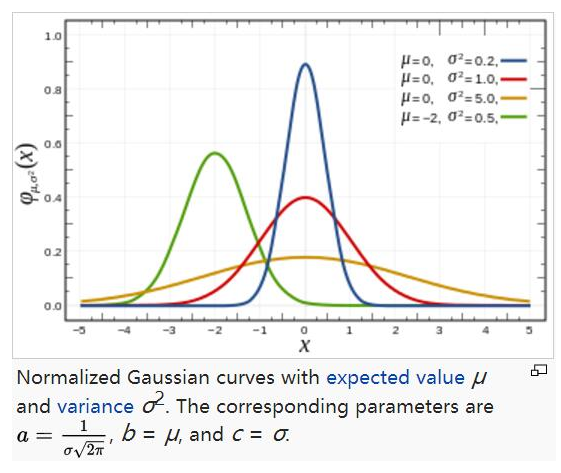
对于任意的实数a,b,c,是以著名数学家Carl Friedrich Gauss的名字命名的。高斯的一维图是特征对称“bell curve”形状,a是曲线尖峰的高度,b是尖峰中心的坐标,c称为标准方差,表征的是bell钟状的宽度。
2. 二维高斯函数
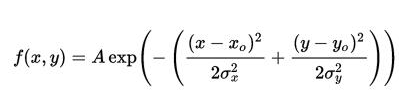
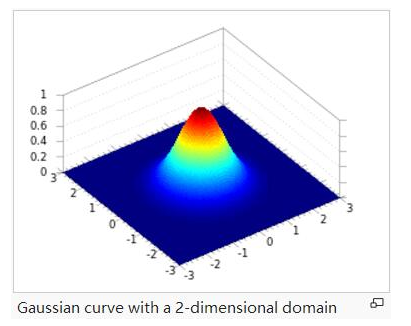
A是幅值,x。y。是中心点坐标,σx σy是方差,图示如下,A = 1, xo = 0, yo = 0, σx = σy = 1
3.二维图像设计
说道“sigma表示的是标准差,如果标准差比较小,这是就相当于图像点运算,则平滑效果不明显;反之,标准差比较大,则相当于平均模板,比较模糊”,那么这么说可能很多人包括一开始的我并不是很理解,这是为什么呢,那么我们需要从高斯函数谈起:
 (期望为0时的特殊情况)
(期望为0时的特殊情况)
这样一个高斯函数的概率分布密度如下图所示:
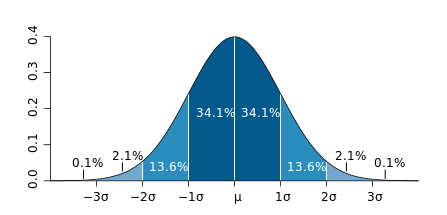
我们要理解好这个图,横轴表示可能得取值x,竖轴表示概率分布密度F(x),那么不难理解这样一个曲线与x轴围成的图形面积为1。sigma(标准差)决定了这个图形的宽度,我给出下述结论:sigma越大,则图形越宽,尖峰越小,图形较为平缓;sigma越小,则图形越窄,越集中,中间部分也就越尖,图形变化比较剧烈。这其实很好理解,如果sigma也就是标准差越大,则表示该密度分布一定比较分散,由于面积为1,于是尖峰部分减小,宽度越宽(分布越分散);同理,当sigma越小时,说明密度分布较为集中,于是尖峰越尖,宽度越窄!
理解好上述结论之后,那么(一)中的结论当然也就顺理成章了,sigma越大,分布越分散,各部分比重差别不大,于是生成的模板各元素值差别不大,类似于平均模板;sigma越小,分布越集中,中间部分所占比重远远高于其他部分,反映到高斯模板上就是中心元素值远远大于其他元素值,于是自然而然就相当于中间值得点运算。
二、高斯函数在图像设计中应用
高斯噪声产生:图像常常受到一些随机误差的影响而退化,我们通常称这个退化为噪声。在图像的捕获、传输或者处理过程中都有可能产生、噪声,噪声可能是依赖于图像内容,可能无关。
噪声一般由其频率的特征来刻画,理想的噪声称为白噪声,高斯噪声就属于白噪声的一种,为白噪声的一个特例。服从高斯(正态)分布。
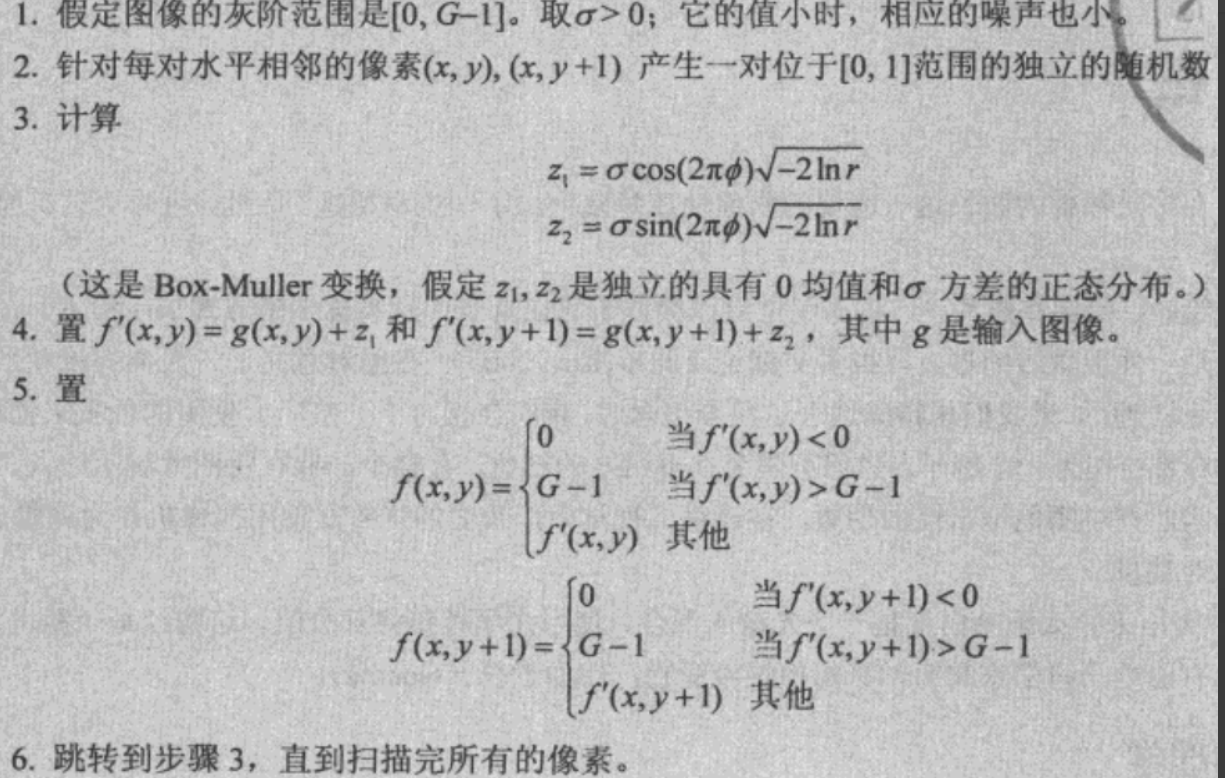
namespace mycv { const double pi = 3.1415926; void createGaussianNoise(cv::Mat& src, cv::Mat& dst) { dst = src.clone(); //1、灰阶范围[0, G - 1], 取sigma > 0; sigma越小噪声越小 const int G = 256; double sigma = 20; for(int i = 0; i < src.rows; ++i) for (int j = 0; j < src.cols - 1; ++j) { //2、产生位于[0, 1]独立随机数gamma、phi std::random_device rd; std::mt19937 gen(rd()); double gamma = std::generate_canonical<double, 2>(gen); double phi = std::generate_canonical<double, 2>(gen); //3、计算z1、z2 double z1 = sigma * std::cos(2 * pi*phi)*std::sqrt(-2 * std::log(gamma)); double z2 = sigma * std::sin(2 * pi*phi)*std::sqrt(-2 * std::log(gamma)); //4、 double tmpxy = src.at<uchar>(i, j) + z1; double tmpxy1 = src.at<uchar>(i, j + 1) + z2; //5 if (tmpxy < 0) dst.at<uchar>(i, j) = 0; else if (tmpxy > G - 1) dst.at<uchar>(i, j) = G - 1; else dst.at<uchar>(i, j) = static_cast<int>(tmpxy); if (tmpxy1 < 0) dst.at<uchar>(i, j + 1) = 0; else if (tmpxy > G - 1) dst.at<uchar>(i, j + 1) = G - 1; else dst.at<uchar>(i, j + 1) = static_cast<int>(tmpxy1); } } }//mycv
实现高斯滤波:
// gaussian filter cv::Mat gaussian_filter(cv::Mat img, double sigma) { int height = img.rows; int width = img.cols; int channel = img.channels(); // prepare output cv::Mat out = cv::Mat::zeros(height, width, CV_8UC3); // prepare kernel int pad = floor(kernel_size / 2); int _x = 0, _y = 0; double kernel_sum = 0; // get gaussian kernel float kernel[kernel_size][kernel_size]; for (int y = 0; y < kernel_size; y++) { for (int x = 0; x < kernel_size; x++) { _y = y - pad; _x = x - pad; kernel[y][x] = 1 / (2 * M_PI * sigma * sigma) * exp(-(_x * _x + _y * _y) / (2 * sigma * sigma)); kernel_sum += kernel[y][x]; } } for (int y = 0; y < kernel_size; y++) { for (int x = 0; x < kernel_size; x++) { kernel[y][x] /= kernel_sum; } } // filtering double v = 0; for (int y = 0; y < height; y++) { for (int x = 0; x < width; x++) { for (int c = 0; c < channel; c++) { v = 0; for (int dy = -pad; dy < pad + 1; dy++) { for (int dx = -pad; dx < pad + 1; dx++) { if (((x - pad) > 0) && ((y - pad) > 0)&&((x + pad) < width) &&((y + pad) < height)) { v += (double)img.at<cv::Vec3b>(y + dy, x + dx)[c] * kernel[dy + pad][dx + pad]; } } } out.at<cv::Vec3b>(y, x)[c] = v; } } } return out; }