本文首发于:行者AI
DRL(Deep Reinforcement Learning)的首次惊艳亮相,应该是 DeepMind 在2013年首次将其应用于 Atari 游戏中提出的 DQN(Deep Q Network)算法。时至今日,DRL 已经从玩 Atari,进化为下围棋(Alphago)、玩电竞(Dota AI、StarCraft AI),一次次刷新大家的三观。
1. 什么是Q-Learning
Q-Learning算法是一种使用时序差分求解强化学习控制问题的方法。通过当前的状态(S),动作(A),即时奖励(R),衰减因子(γ),探索率(ϵ),就最最优的动作价值函数(Q)和最有策略(π)。
-
(S):表示环境的状态,在(t)时刻环境的状态(S_t)
-
(A):agent的动作,在(t)时刻采取的动作(A_t)
-
(R):环境的奖励,在(t)时刻agent在状态St采取动作(A_t)对应的奖励(R_{t+1}) 会在 (t+1) 时刻得到
-
(gamma):折扣因子, 当前延时奖励的权重
-
(epsilon):探索率,在Q-learning我们会选取当前轮迭代价值最大的动作,可能会导致有的动作重来都没被执行过,在agent选择动作时,有小概率不是选取当前迭代价值最大的动作。
1.1 Q-Learning算法简介
首先我们基于状态(S),用(ϵ−greed)(贪心)选择到动作(A), 然后执行动作(A),得到奖励(R),并进入状态(S'),(Q)值的更新公式如下:
(Q(S,A)=Q(S,A)+alpha(R+gamma maxQ(S',a)-Q(S,A)))
1.2 Q-learning的算法流程
-
随机初始化状态和动作价值对应的价值。(初始化(Q)表格)
-
for i from 1 to T(T:迭代的总轮数)
a)初始化(S)为当前状态的序列的第一个状态
b)用(ϵ)−贪婪法在当前状态(S)选择出动作(A)
c)在状态(S)执行当前动作(A),得到新状态(S′)和奖励(R)
d)更新价值函数(Q(S,A)):
(Q(S,A)=Q(S,A)+alpha(R+gamma maxQ(S',a)-Q(S,A)))e)(S=S')
f) if (done) 完成当前迭代
1.3 关于Q_table举个例子
(1)游戏地图

-
黑色的框为陷阱
-
黄色的框为出口(奖励点)
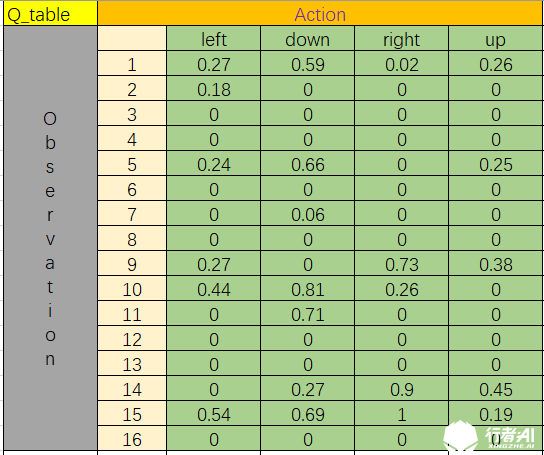
(2) 这是一个训练模型之后的Q表格
(3) 举个简单的例子
- 如果agent在“1”的位置进入迷宫,会更具Q表格,向下走的Q值最大为0.59,那么agent就会走到“5”的位置。
- agent在“5”的位置之后,更具Q表格,向下走的Q值最大为0.66,依然是向下走,那么agent就走到了“9”的位置。
- agent在“9”的位置之后,更具Q表格,向右走的Q值最大为0.73,依然是向下走,那么agent就走到了“10”的位置。
- agent在“10”的位置之后,更具Q表格,向下走的Q值最大为0.81,依然是向下走,那么agent就走到了“14”的位置。
- agent在“14”的位置之后,更具Q表格,向右走的Q值最大为0.9,依然是向下走,那么agent就走到了“15”的位置。
- agent在“15”的位置之后,更具Q表格,向右走的Q值最大为1,依然是向下走,那么agent就走到了“16”的位置,到达终点。
最后agent的动作路线为1-->5-->9-->10-->14-->15-->16
每跑一次,(Q)表格的值都会有所改变,但是原理不变。
如果想看到更加直观的视觉戳这里
2. DQN(Deep Q Network)
前面讲过Q-Learning的决策是根据Q表格的值,执行那个动作后得到的奖励更多,就选取那个动作执行。前面所讲的状态空间和动作空间都很小,如果状态空间和动作空间变得很大很大,那我们还能用一个Q表格来表示吗?显然不可以,就引入了价值函数近似。
2.1 价值函数近似
由于在实际问题中,一个问题的状态规模很大,一个可行的解决办法就是使用价值函数近似。我们引入一个状态价值函数(hat v),由权重(omega)描述,以状态(s)作为输入,计算得到状态(s)的价值:
(hat v(s,w)approx v_pi(s))
上面我们提到的(omega)就相当于我们神经网络中的参数,通过输入的状态(s),采用MC(蒙特卡洛)/TD(时序差分)计算出价值函数作为输出,然后对权重(omega)进行训练,直到收敛。事实上,所谓的DQN就是将神经网络和Q-Learning结合,将Q表格变成了Q网络。
2.2 Deep Q-Learning算法思路
DQN是一种Off-Policy算法,用李宏毅老师的话讲,可以看着别人学习,那么DQN为什么能够看着别人学习呢?DQN采用了一种经验回放的方式进行学习。每次agent和环境交互得到的奖励,当前状态和下一个状态等数据保存起来,用于后面Q网络的更新。
下面我们看下Nature DQN,其实Nature DQN为DQN第二代了,DQN NIPS为最原始的DQN,在这之上的还有很多的DQN的版本,比如Double DQN、Dueling DQN等等。之所以在这儿给大家介绍Nature DQN呢!个人觉得这个版本的DQN,应该是最经典的了。接下来我们看看DQN是如何进行强化学习的吧。
2.3 算法流程图
输入:总迭代轮数(T),状态特征维度(n),动作维度(A), 步长(a),衰减因子(gamma), 探索率(epsilon), 当前Q网络(Q),目标Q网络(Q'), 批量梯度下降的样本数(m),目标Q网络参数更新频率(P)。
输出:Q网络参数
- 随机初始化所有的状态和动作对应的价值(Q),随机初始化当前(Q)网络的所有参数(omega),初始化目标Q网络(Q')的参数(omega)'=(omega),清空经验池(D)
- for i from 1 to T(不断地迭代)
a)初始化环境,获取第一个状态(s),获取特征向量(phi)((S))
b)在(Q)网络中使用(phi)((S))作为输入,得到(Q)网络所有动作的Q值,使用(epsilon)-贪婪法在当前的Q值输出中选择对应的动作(A)
c)在状态(S)下执行动作(A),得到新的状态(S'),以及其对应的(phi)((S'))和奖励(R),是否为结束状态(isdone)
d)将{(phi(S)), (A), (R), (phi(S')), (isdone) }将这5个元素放入经验池(D)
e) (S=S')
f)从经验池(D)中采取(m)个样本,{(phi(S_j)), (A_j), (R_j), (phi(S'_j), (isdone_j)),(j=1,2,3,4....m),计算当前(Q)值(y_j):

g)使用均方差损失函数(left(frac{1}{m}
ight))(sum_{j=1}^m)((y_j-Q(phi (S_j),A_j,omega))^2)通过神经网络梯度下降反向传播更新参数(omega)
h)如果i%P=0,跟新目标(Q)网络的参数(omega'=omega)
i)如果(S')为终止状态,则当前迭代完毕,否则跳转到步骤(2)
2.4 DQN实现代码
(1) 网络结构
class Net(nn.Module):
def __init__(self, ):
super(Net, self).__init__()
self.fc1 = nn.Linear(N_STATES, 50)
self.fc1.weight.data.normal_(0, 0.1) # initialization
self.out = nn.Linear(50, N_ACTIONS)
self.out.weight.data.normal_(0, 0.1) # initialization
def forward(self, x):
x = self.fc1(x)
x = F.relu(x)
actions_value = self.out(x)
return actions_value
- 两个网络的结构一样。
- 参数权重有区别,一个是实时更新,一个是隔一段时间在更新。
(2) 动作的选取
def choose_action(self, x): #x为当前状态的4个值
x = torch.unsqueeze(torch.FloatTensor(x), 0) #在数据的第0维处增加一维
# input only one sample
if np.random.uniform() < EPSILON: # greedy #贪婪取法
actions_value = self.eval_net.forward(x) ##传入eval_net获取下一个的动作
action = torch.max(actions_value, 1)[1].data.numpy() ##返回这一行中最大值的索引
action = action[0] if ENV_A_SHAPE == 0 else action.reshape(ENV_A_SHAPE) # return the argmax index
else: # random
action = np.random.randint(0, N_ACTIONS)
# action = random.sample(N_ACTIONS)
action = action if ENV_A_SHAPE == 0 else action.reshape(ENV_A_SHAPE)
return action
加入了一个探索值((epsilon)),在即小的可能性是随机选择动作。
(3) 经验池
def store_transition(self, s, a, r, s_): #s和s_都为4个值,分别为 位置 移动速度 角度 移动角度
transition = np.hstack((s, [a, r], s_))
# replace the old memory with new memory #更新经验
index = self.memory_counter % MEMORY_CAPACITY
self.memory[index, :] = transition #将第index经验替换为transition
self.memory_counter += 1
(4) 更新网络参数
def learn(self):
# target parameter update 目标参数更新
if self.learn_step_counter % TARGET_REPLACE_ITER == 0:
self.target_net.load_state_dict(self.eval_net.state_dict()) ## 每学习200步将eval_net的参数赋值给target_net
self.learn_step_counter += 1
# sample batch transitions #选取过渡
sample_index = np.random.choice(MEMORY_CAPACITY, BATCH_SIZE) #从MEMORY_CAPACITY随机选取BATCH_SIZE个
b_memory = self.memory[sample_index, :]
b_s = torch.FloatTensor(b_memory[:, :N_STATES]) #第一个状态
b_a = torch.LongTensor(b_memory[:, N_STATES:N_STATES+1].astype(int)) #动作
print("--------")
print(b_a)
print("-----")
b_r = torch.FloatTensor(b_memory[:, N_STATES+1:N_STATES+2]) #得分
b_s_ = torch.FloatTensor(b_memory[:, -N_STATES:]) #下一个状态
# q_eval w.r.t the action in experience
q_eval = self.eval_net(b_s).gather(1, b_a) # shape (batch, 1) 当前状态的Q值使用eval_net计算
# print("++++++")
# print(self.eval_net(b_s))
# print(self.eval_net(b_s).gather(1,b_a))
# print("+++++++")
q_next = self.target_net(b_s_).detach() #使用target_net计算下一步Q值 # detach from graph, don't backpropagate detach防止targent——net反向传播
q_target = b_r + GAMMA * q_next.max(1)[0].view(BATCH_SIZE, 1) # shape (batch, 1)
loss = self.loss_func(q_eval, q_target)
self.optimizer.zero_grad() #zer——grad设置所有优化器的梯度为0
loss.backward() #反向传播
self.optimizer.step() #执行下个优化
DQN是深度强化学习的门槛,只要踏进了大门,后面的学习就会很轻松。
PS:更多技术干货,快关注【公众号 | xingzhe_ai】,与行者一起讨论吧!