5种方法。参考案例interest_points_comparison.hdev

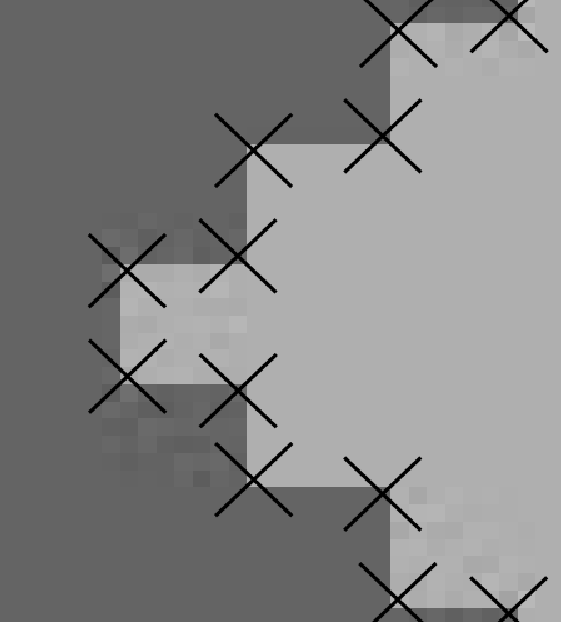
表现最好的是points_sojka,上图右。
read_image (Image, 'C:/Users/角点图/111.jpg') rgb1_to_gray (Image, Image) * corner_response (Image, ImageCorner, 3, 0.04) threshold (ImageCorner, Regions, 100, 255) dev_set_color ('black') dev_set_line_width (3) * points_foerstner (Image, 1, 2, 3, 200, 0.3, 'gauss', 'false', RowJunctions, ColumnJunctions, CoRRJunctions, CoRCJunctions, CoCCJunctions, RowArea, ColumnArea, CoRRArea, CoRCArea, CoCCArea) gen_cross_contour_xld (Cross1, RowJunctions, ColumnJunctions, 6, 0.785398) dev_display (Image) dev_display (Cross1) * points_harris (Image, 0.7, 2, 0.08, 1000, Row2, Column2) gen_cross_contour_xld (Cross2, Row2, Column2, 6, 0.785398) dev_display (Image) dev_display (Cross2) * points_harris_binomial (Image, 5, 15, 0.08, 1000, 'on', Row3, Column3) gen_cross_contour_xld (Cross3, Row3, Column3, 6, 0.785398) dev_display (Image) dev_display (Cross3) * points_lepetit (Image, 3, 1, 15, 30, 'interpolation', Row4, Column4) gen_cross_contour_xld (Cross4, Row4, Column4, 6, 0.785398) dev_display (Image) dev_display (Cross4) * points_sojka (Image, 9, 2.5, 0.75, 30, 90, 0.5, 'true', Row5, Column5) gen_cross_contour_xld (Cross5, Row5, Column5, 6, 0.785398) dev_display (Image) dev_display (Cross5)