看门狗的作用:在系统错乱跑飞时复位系统
STM32内置两个看门狗,可以用来检测和解决又软件引起的错误和故障,当计数器达到给定超时值时,触发中断(仅适用窗口看门狗)或者产生系统复位
独立看门狗: IWDG由专用低速时钟(LSI)驱动,即使主时钟发生故障时仍有效(独立看门狗适用于需要看门狗作为一个在主程序之外能够完全独立工作,并且对时间要求较低)
窗口看门狗:从APB1时钟分频后得到时钟驱动,通过可配置的时间窗口来检测应用程序非正常的 过迟或过早操作(窗口看门狗最适合那些要求看门狗在精确计时窗口起作用的程序)
独立看门狗原理:
在键值寄存器(IWDG_KR)中写入0xCCCC,开始启用独立看门狗,此时计数器从其复位值0xFFFF递减,当计数器计数到尾值0x0000时产生一个复位信号(IWDG_REST)
无论何时,只要在键值寄存器(IWDG_KR)写入0xAAAA(喂狗),自动装载寄存器IWDG_RLR的值就会重新加载到计数器,从而避免看门狗复位
如果程序异常,就无法正常喂狗,从而系统复位
~键值寄存器IWDG_KR 0-15位有效 0xCCCC(启动看门狗) 0xAAAA(重新装载 喂狗) (写入0x5555表示允许访问IWDG_PR和IWDG_RLR)
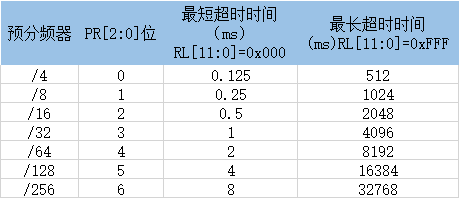
~预分频寄存器IWDG_PR 0-2位有效 时钟分频 具有写保护
~重装载寄存器IWDG_RLR 0-11位有效 装载一个值,喂狗时加载到递减计数器, 具有写保护
~状态寄存器IWDG_SR 0-1位有效 看门狗状态
独立看门狗操作步骤
①取消寄存器写保护 IWDG_WriteAccessCmd()
②设置独立看门狗分频系数 IWDG_SetPrescaler()
③设置看门重装载值 IWDG_SetReload()
④使能看门狗 IWDG_Enable()
⑤应用程序喂狗 IWDG_ReloadCounter()
看门狗溢出时间计算:Tout=((4x2^prer)xrlr)/32 (M4)
#include "stm32f4xx.h" #include "usart.h" #include "delay.h" void LED_Init(void) { //GPIOF9初始化设置 GPIO_InitTypeDef GPIO_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//使能GPIOF时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//LED对应IO口 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式 GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉 GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化GPIO GPIO_SetBits(GPIOF,GPIO_Pin_9);//GPIOF9设置高,灯灭 //GPIO_ResetBits(GPIOF,GPIO_Pin_9);//输出低电平,灯亮 } void Key_InIt(void) { //GPIOF9初始化设置 GPIO_InitTypeDef GPIO_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);//使能GPIOF时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;//LED对应IO口 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//输出模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉 GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIO } u8 KEY_Scan(u8 mode) { static u8 key_up=1;//按键按松开标志 if(mode)key_up=1; //支持连按 if(key_up&&(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==0)) { delay_ms(10);//去抖动 key_up=0; if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==0)return 1; }else if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==1)key_up=1; return 0;// 无按键按下 } void IWDG_Init(u8 prer,u16 rlr) { //取消写保护 IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable); //设置独立看门狗分频系数 IWDG_SetPrescaler(prer); //设置看门重装载值 IWDG_SetReload(rlr); IWDG_ReloadCounter();//初始化值 喂狗 //使能看门狗 IWDG_Enable(); } int main(void) { delay_init(168); LED_Init(); Key_InIt(); IWDG_Init(6,500);//初始化独立看门狗 delay_ms(500); GPIO_ResetBits(GPIOF,GPIO_Pin_9); while(1) { if(KEY_Scan(0)==1) { IWDG_ReloadCounter();//喂狗 } delay_ms(10); } }