代码
#include <iostream>
#include <opencv2imgproc.hpp>
#include <opencv2calib3d.hpp>
#include <opencv2highgui.hpp>
#include <Kinect.h>
using namespace std;
using namespace cv;
void draw(Mat & img, Joint & r_1, Joint & r_2, ICoordinateMapper * myMapper);
int main(void)
{
IKinectSensor * mySensor = nullptr;
GetDefaultKinectSensor(&mySensor);
mySensor->Open();
IColorFrameSource * myColorSource = nullptr;
mySensor->get_ColorFrameSource(&myColorSource);
IColorFrameReader * myColorReader = nullptr;
myColorSource->OpenReader(&myColorReader);
int colorHeight = 0, colorWidth = 0;
IFrameDescription * myDescription = nullptr;
myColorSource->get_FrameDescription(&myDescription);
myDescription->get_Height(&colorHeight);
myDescription->get_Width(&colorWidth);
IColorFrame * myColorFrame = nullptr;
Mat original(colorHeight, colorWidth, CV_8UC4);
//**********************以上为ColorFrame的读取前准备**************************
IBodyFrameSource * myBodySource = nullptr;
mySensor->get_BodyFrameSource(&myBodySource);
IBodyFrameReader * myBodyReader = nullptr;
myBodySource->OpenReader(&myBodyReader);
int myBodyCount = 0;
myBodySource->get_BodyCount(&myBodyCount);
IBodyFrame * myBodyFrame = nullptr;
ICoordinateMapper * myMapper = nullptr;
mySensor->get_CoordinateMapper(&myMapper);
//**********************以上为BodyFrame以及Mapper的准备***********************
while (1)
{
while (myColorReader->AcquireLatestFrame(&myColorFrame) != S_OK);
myColorFrame->CopyConvertedFrameDataToArray(colorHeight * colorWidth * 4, original.data, ColorImageFormat_Bgra);
Mat copy = original.clone(); //读取彩色图像并输出到矩阵
while (myBodyReader->AcquireLatestFrame(&myBodyFrame) != S_OK); //读取身体图像
IBody ** myBodyArr = new IBody *[myBodyCount]; //为存身体数据的数组做准备
for (int i = 0; i < myBodyCount; i++)
myBodyArr[i] = nullptr;
if (myBodyFrame->GetAndRefreshBodyData(myBodyCount, myBodyArr) == S_OK) //把身体数据输入数组
for (int i = 0; i < myBodyCount; i++)
{
BOOLEAN result = false;
if (myBodyArr[i]->get_IsTracked(&result) == S_OK && result) //先判断是否侦测到
{
Joint myJointArr[JointType_Count];
if (myBodyArr[i]->GetJoints(JointType_Count, myJointArr) == S_OK) //如果侦测到就把关节数据输入到数组并画图
{
draw(copy, myJointArr[JointType_Head], myJointArr[JointType_Neck], myMapper);
draw(copy, myJointArr[JointType_Neck], myJointArr[JointType_SpineShoulder], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_ShoulderLeft], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_SpineMid], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_ShoulderRight], myMapper);
draw(copy, myJointArr[JointType_ShoulderLeft], myJointArr[JointType_ElbowLeft], myMapper);
draw(copy, myJointArr[JointType_SpineMid], myJointArr[JointType_SpineBase], myMapper);
draw(copy, myJointArr[JointType_ShoulderRight], myJointArr[JointType_ElbowRight], myMapper);
draw(copy, myJointArr[JointType_ElbowLeft], myJointArr[JointType_WristLeft], myMapper);
draw(copy, myJointArr[JointType_SpineBase], myJointArr[JointType_HipLeft], myMapper);
draw(copy, myJointArr[JointType_SpineBase], myJointArr[JointType_HipRight], myMapper);
draw(copy, myJointArr[JointType_ElbowRight], myJointArr[JointType_WristRight], myMapper);
draw(copy, myJointArr[JointType_WristLeft], myJointArr[JointType_ThumbLeft], myMapper);
draw(copy, myJointArr[JointType_WristLeft], myJointArr[JointType_HandLeft], myMapper);
draw(copy, myJointArr[JointType_HipLeft], myJointArr[JointType_KneeLeft], myMapper);
draw(copy, myJointArr[JointType_HipRight], myJointArr[JointType_KneeRight], myMapper);
draw(copy, myJointArr[JointType_WristRight], myJointArr[JointType_ThumbRight], myMapper);
draw(copy, myJointArr[JointType_WristRight], myJointArr[JointType_HandRight], myMapper);
draw(copy, myJointArr[JointType_HandLeft], myJointArr[JointType_HandTipLeft], myMapper);
draw(copy, myJointArr[JointType_KneeLeft], myJointArr[JointType_FootLeft], myMapper);
draw(copy, myJointArr[JointType_KneeRight], myJointArr[JointType_FootRight], myMapper);
draw(copy, myJointArr[JointType_HandRight], myJointArr[JointType_HandTipRight], myMapper);
}
}
}
delete[]myBodyArr;
myBodyFrame->Release();
myColorFrame->Release();
imshow("TEST", copy);
if (waitKey(30) == VK_ESCAPE)
break;
}
myMapper->Release();
myDescription->Release();
myColorReader->Release();
myColorSource->Release();
myBodyReader->Release();
myBodySource->Release();
mySensor->Close();
mySensor->Release();
return 0;
}
void draw(Mat & img, Joint & r_1, Joint & r_2, ICoordinateMapper * myMapper)
{
//用两个关节点来做线段的两端,并且进行状态过滤
if (r_1.TrackingState == TrackingState_Tracked && r_2.TrackingState == TrackingState_Tracked)
{
ColorSpacePoint t_point; //要把关节点用的摄像机坐标下的点转换成彩色空间的点
Point p_1, p_2;
myMapper->MapCameraPointToColorSpace(r_1.Position, &t_point);
p_1.x = t_point.X;
p_1.y = t_point.Y;
myMapper->MapCameraPointToColorSpace(r_2.Position, &t_point);
p_2.x = t_point.X;
p_2.y = t_point.Y;
line(img, p_1, p_2, Vec3b(0, 255, 0), 5);
circle(img, p_1, 10, Vec3b(255, 0, 0), -1);
circle(img, p_2, 10, Vec3b(255, 0, 0), -1);
}
}
详细说明
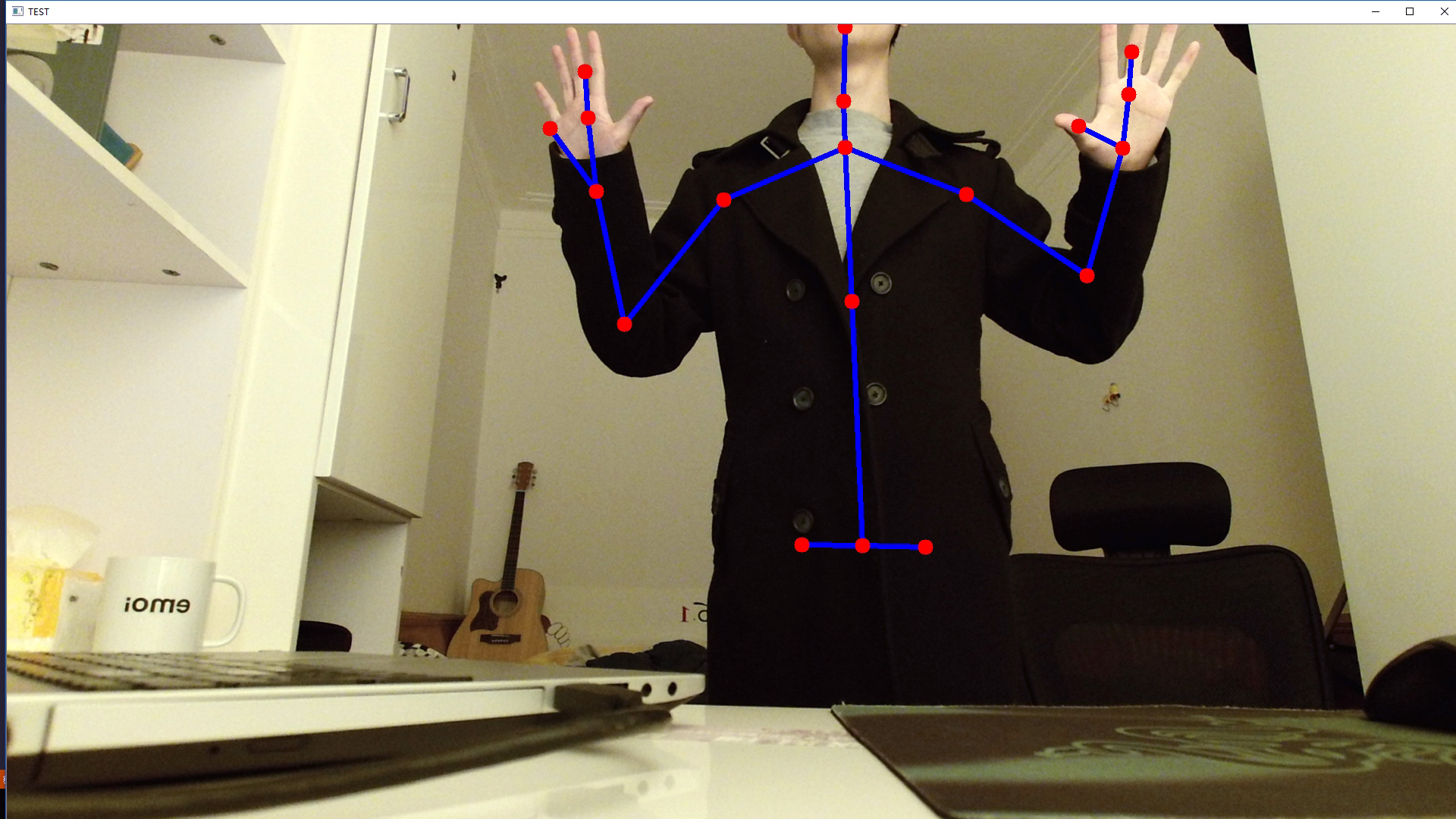
不难发现代码跟前面一篇非常类似,不同的地方就在于绘图部分。首先要将关节点用的CameraSpace转换到ColorSpace,这一操作可以借助ICoordinateMapper完成,然后就用两个关节点来作为线段的两端画线。这里采用了广度优先的办法,从上到下一层一层选取关节点。
效果图