惯性导航一般以惯组(IMU)的几何中心(或某一固定参考点)作为导航定位或测速的参考基准,而卫星导航则以接收机天线的相位中心作为参考基准,
在实际运载体中同时使用两种甚至多种导航系统时,它们在安装位置上往往会存在一定的偏差。为了将多种导航系统的导航信息进行比对和融合,必须对导航
信息实施转换,转换至统一的参考基准下表示。
用实测数据跑程序时,需要注意一下几个关于杆臂的问题:
(1)IMU到GNSS的矢量,还是GNSS到IMU的矢量;
(2)b-frame是f-r-d,还是r-f-u;
(3)数据融合是INS转换到GNSS参考基准(GNSS接收机天线的相位中心)上,还是GNSS转到INS参考基准(IMU几何中心)上
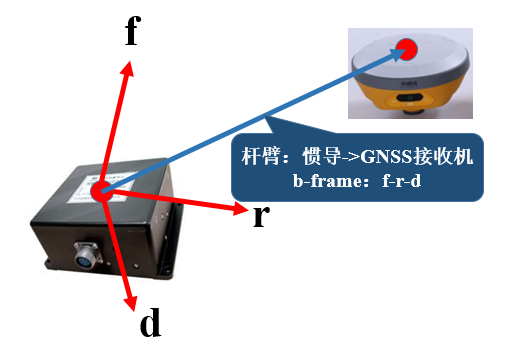
ignav中杆臂如上图所示。
具体配置文件如下:
ins-leverarm1 = 0.0 # f lever arm from INS to GPS antenna in frd-frame (pos-gnss = pos-ins + Cbe*L^b )
ins-leverarm2 = 0.153 # r
ins-leverarm3 =-0.179 # d