UART —— Universal Asynchronous Receiver/Transmitter —— 通用异步收发器
一、UART简介
(强烈推荐一篇详细介绍UART的博客:https://www.cnblogs.com/mylinux/p/4078576.html)
UART是异步串口通信协议,
工作原理是将传输数据的每个字符一位接一位地传输,它能将要传输的资料在串行通信与并行通信之间加以转换,能够灵活地与外部设备进行全双工数据交换。
USART是UART的升级版,其支持同步模式,用法与UART相同
二、概念辨析
------------------------------------UART COM口 串口 USB口 RS - 232 TTL---------------------------------------------
UART,在硬件上表现为串口收发的逻辑电路,可被集成为独立地模块化芯片
COM口,串行通信端口,有时也称为串口,是一种连接器的结构,这里区别于USB的“通用串行总线”和硬盘的“SATA”,串口的接口标准规范和总线标准规范是RS-232
常见的有两种物理标准,D型9针插头,和4针杜邦头,

USB口:通用串行总线,和串口完全是两个概念。虽然也是串行方式通信,但由于USB的通信时序和信号电平都和串口完全不同,因此和串口没有任何关系。USB是高速的通信接口,用于PC连接各种外设,U盘、键鼠、移动硬盘、当然也包括“USB转串口”的模块。(USB转串口模块,就是USB接口的UART模块)
TTL,RS232,RS485等都是一种逻辑电平的表示方式,详见:A
三、UART原理说明
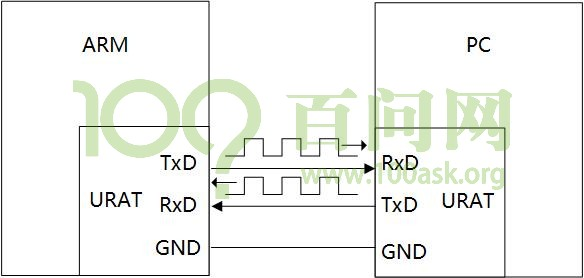
发送数据时,CPU将并行数据写入UART,UART按照一定格式在一根电线上串行发出;接收数据时,UART检测另一根电线上的信号,将串行收集放在缓冲区,CPU就可以读取UART获取这些数据。
TxD —— 发送数据 RxD —— 接收数据 Gnd —— 用于给双方提供参考电平
UART使用标准的TTL / CMOS 逻辑电平来表示数据,高电平表示1,低电平为0,。为了增强数据的抗干扰能力,提高传输长度,通常将TTL / COMS逻辑电平转换为RS-232逻辑电平
数据传输流程:以传输一字节数据‘A’为例
传送时,数据的低位在前,高位在后
传送开始前,发收双方把所采用的起止式格式(包括字符的数据位长度,停止位位数,有无校验位以及是奇校验还是偶校验等)和数据传输速率---波特率(每一位占据的时间)作统一规定。
规定传输协议
1)平时数据线处于“空闭”状态(1状态)
2)当要发送数据时,UART改变TxD数据线的状态,变为0状态,并维持一位的时间,这样接收方检测到开始位后,再等待1.5位的时间就开始一位一位地检测数据线的状态得到所传输的数据。
3)UART一帧中可以有5/6/7/8位的数据,发送方一位一位的改变数据线的状态将数据发送出去,首先发送最低位
4)如果使用校验功能,UART在发送完数据后,还要发送一个校验位:奇校验,偶校验——数据位连同校验位中,“1”的数目属于奇数或偶数。
5)最后发送停止位,数据线恢复到“空闭”状态(1状态),停止位长度有三种:1位、1.5位、2位
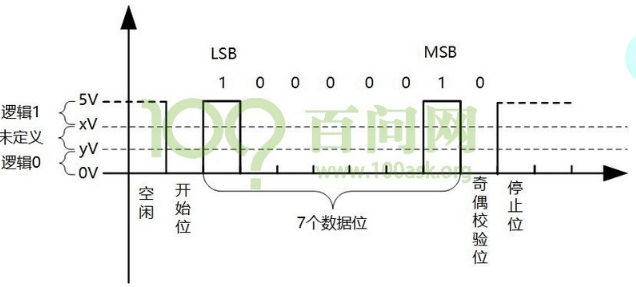
图1-1 TTL / COMS逻辑电平下,传输A时的波形
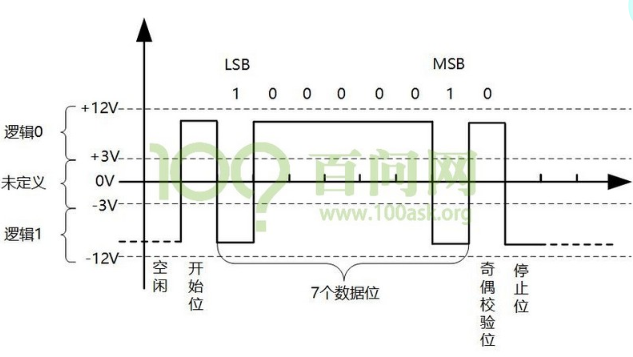
图1-2 RS - 232逻辑电平下,传输数据A的波形
对于TTL / CMOS 电平,在xV至5V之间,就认为是逻辑1,在0V至yV之间就为逻辑0。
对于RS - 232电平,在-12V至-3V之间,就认为是逻辑1,在+3V至+12V之间就为逻辑0。
RS-232的电平比TTL/CMOS高,能传输更远的距离,在工业上用得比较多。
在ARM芯片上的串口都是TTL电平的,通过板子或外接电平转换芯片,可以转成RS232标准的接口。如图2-1所示
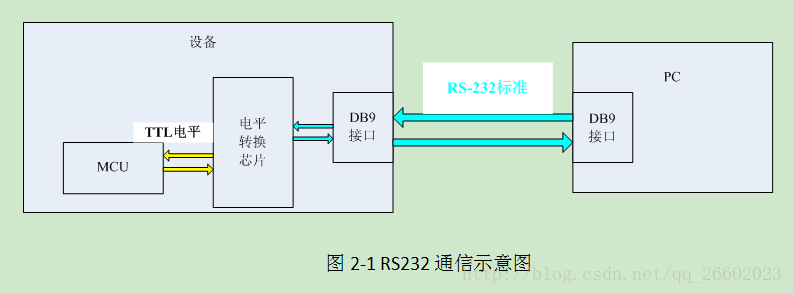
如今终端上的RS-232标准的接口越来越少,越多的是USB口,因也可以使用USB转串口芯片将TTL电平转为USB传输电平。
四、异步串行通信的特点
所谓异步通信,是指数据传送以字节为单位,字符与字符间的传送是完全异步的,位与位的传送基本是同步的。
特点:
1)以字符为单位传送信息
2)相邻两字符间的间隔任意长
3)由于一个字符的波特位长度有限,所以需要接受时钟和发送时钟相近就可以
4)字符间异步,字符内同步
五、基本结构
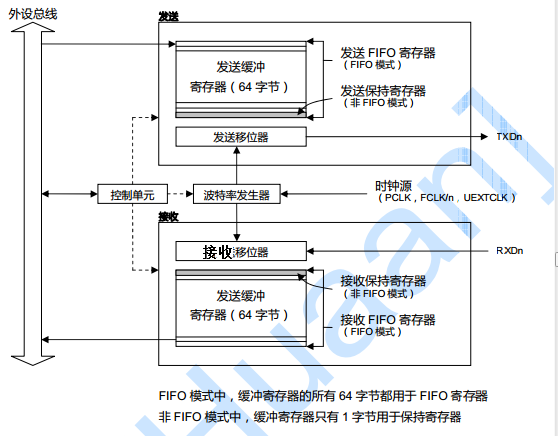
图3-1 UART结构图
ARM处理器中UART功能相似,都有独立的通道,每个通道都可工作于中断或DMA模式,即UART可以发出中断或DMA请求以便在UART、CPU间传输数据。具体的UART特性可参见不同芯片的芯片手册。以下以S3C2440芯片分析UART的使用过程。
S3C2440 UART的FIFO深度为64字节。发送数据时,CPU先将数据写入发送FIFO中,然后UART自动将FIFO的数据复制到“发送移位器”中,发送移位器将数据一位一位地发送到TxDn数据线上(按照设定的格式,插入开始位,校验位和停止位)。接收数据时,“接收移位器”将RxDn数据线上的数据一位一位接收进来,然后复制到FIFO中,CPU即可从中读取数据。UART的结构如图3-1所示。
六、使用UART
在UART通道0上实现最简单的字符发送与接收功能
1、看原理图,找到对应引脚
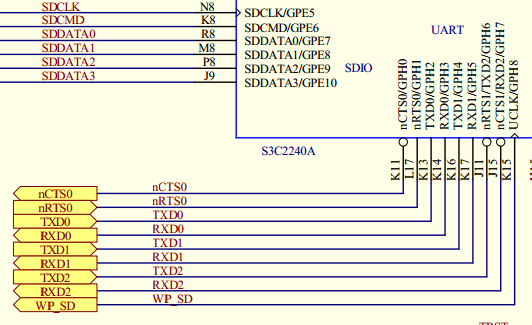
使用TxD0与RxD0,对应GPH2, GPH3


2、设置波特率
每个UART的波特率发生器要为发送器与接收器提供串行时钟,对于S3C2440,其波特率发送器的时钟源可以选择
PCLK(外设时钟),FCLK/n(帧时钟),UEXTCLK,设置波特率可以通过UART波特率分频寄存器所得,有以下公式:
UBRDIVn = (int)( UART 时钟源 / ( 波特率 x 16) ) –1
PCLK = 50MHZ = 50000000,使用波特率115200,得出UBRDIVn=26

接下来看如何设置相关寄存器:
1) UCON0 —— UART 控制寄存器
选择PCLK外设时钟作为时钟源,

仅需设置[11:10] - 时钟选择,设置成0,对于[15:12]为时钟源为FCLK情况下的设置,故不用设置。
[9:4]位,为uart中断相关,暂时不用设置。
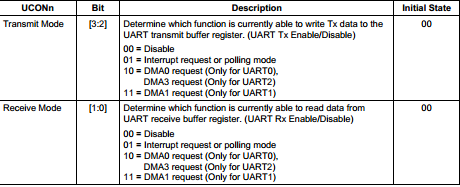
接收模式和接收模式都设置为中断或查询模式。[3:0] = 0101
由上:UCON0 = 0x00000005; UBRDIVn=26;
3、设置其他的特殊寄存器
1)ULCON -- UART线路控制寄存器
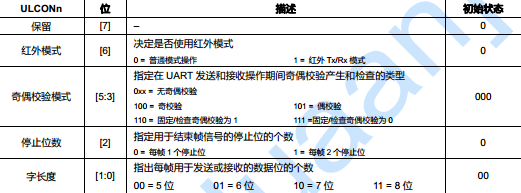
不使用红外模式;奇偶校验位,暂时不设置;停止位设置为0,使用一个停止位;传送的数据位数选择8位;
ULCON0 = 0x00000003;
2)UFCON0 --- FIFO控制寄存器
FIFO在UART传输大量数据的时候有很大作用,暂时先不设置,保持默认值
3)UMCON0 --- 流量控制寄存器
默认值
4)UTRSTAT0 -- Tx / Rx状态寄存器
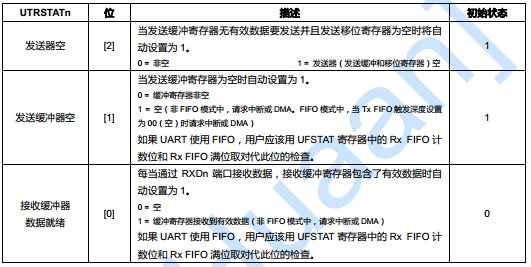
发送器空[2]=1,说明发送缓冲空间为空,且移位寄存器里的数据已经发送出去,因此可以通过判断这
一位,当其为1时,就可往里面写数据。
接收缓冲器,[0]=1, 有数据,可以读取
5)UFRSTAT0 -- 错误状态寄存器
假设一切正常,默认值
6)UFSTAT0 -- FIFO状态寄存器
暂时没用到FIFO,不用设置(对于2440,使用FIFO时,缓冲区可以存放64字节的数据,不使用FIFO
只能存放1字节的数据)
7)UMSTAT0 -- MODEM状态寄存器
不用设置
8)UTXH0 与 URXH0 ---发送/接收缓冲寄存器
发送数据,将数据写入UTXH0即可,接收数据,从URXH0读即可
七、示例


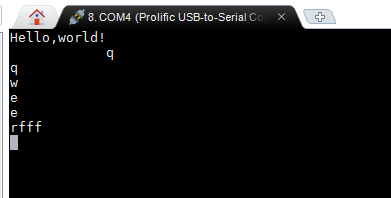
1 #include "uart.h" 2 3 int main(void) 4 { 5 unsigned char c; 6 7 uart0_init(); 8 puts("Hello, world! "); 9 10 while(1) 11 { 12 c = getchar(); 13 if (c == ' ') 14 { 15 putchar(' '); 16 } 17 18 if (c == ' ') 19 { 20 putchar(' '); 21 } 22 23 putchar(c); 24 } 25 return 0; 26 }
1 #define __REG(x) (*(volatile unsigned int *)(x)) 2 #define GPHCON __REG(0x56000070) //Port H control 3 #define GPHUP __REG(0x56000078) //Pull-up control H 4 #define UCON0 __REG(0x50000004) //UART 0 control 5 #define UBRDIV0 __REG(0x50000028) //UART 0 baud rate divisor 6 #define ULCON0 __REG(0x50000000) //UART 0 line control 7 #define UTRSTAT0 __REG(0x50000010) //UART 0 Tx/Rx status 8 #define UTXH0 __REG_BYTE(0x50000020) //UART 0 transmission hold 9 #define URXH0 __REG_BYTE(0x50000024) //UART 0 receive 10 11 12 void uart0_init() 13 { 14 /* 设置引脚用于串口 */ 15 /* GPH2->TxD0->[5:4]=10,GPH3->RxD0->[7:6]=10 ,即[7:4]=1010*/ 16 GPHCON &= ~((3<<4) | (3<<6)); //先将第5位到第8位清零,~(110000 | 11000000) = ~1111000 = 00001111 17 GPHCON |= ((2<<4) | (2<<6)); //(100000 | 10000000) = 10100000,由于[7:4]已经清零了。所以直接或上就可以 18 19 GPHUP &= ~((1<<2) | (1<<3)) ; //将2,3引脚使能内部上拉,将[2:3]=00 20 21 /* 设置波特率 */ 22 /**UBRDIVn = (int)( UART clock / ( buad rate x 16) ) –1*/ 23 /*UART CLOCK设置为PCLK (50MHZ)= 50000000, UBRDIV0 = 26*/ 24 UCON0 = 0x00000005; /*PCLK,查询/中断*/ 25 UBRDIV0 = 26; 26 27 /* 设置数据格式 */ 28 ULCON0 = 0x00000003; /* 8n1:8个数据位,没有校验位,1个停止位 */ 29 30 /* */ 31 } 32 33 int putchar(int c) 34 { 35 /* UTRSTAT0 -- 发送接收状态寄存器*/ 36 /* UTXH0 发送缓冲寄存器 */ 37 while(!(UTRSTAT0 & (1<<2))) ; //UTRSTAT0的[2]不为1,说明有数据,循环等待 38 UTXH0 = (unsigned char)c; //没有数据,写入数据 39 40 } 41 42 int getchar(void) 43 { 44 /* URXH0 接收缓冲寄存器 */ 45 while(!(UTRSTAT0 & (1<<0))) ; //UTRSTAT0的[1]不为1,说明没有数据在接收缓冲区,循环等待 46 return URXH0; //有数据,读出数据 47 48 } 49 50 int puts(const char *s) 51 { 52 while(*s) 53 { 54 putchar(*s); 55 s++; 56 } 57 }
1 #ifndef _UART_H 2 #define _UART_H 3 4 void uart0_init(); 5 int putchar(int c); 6 int getchar(void); 7 int puts(const char *s); 8 9 #endif
1 all: 2 arm-linux-gcc -c -o uart.o uart.c 3 arm-linux-gcc -c -o main.o main.c 4 arm-linux-gcc -c -o start.o start.S 5 arm-linux-ld -Ttext 0 start.o uart.o main.o -o uart.elf 6 arm-linux-objcopy -O binary -S uart.elf uart.bin 7 arm-linux-objdump -D uart.elf > uart.dis 8 clean: 9 rm *.bin *.o *.elf *.dis
1 .text 2 .global _start 3 4 _start: 5 6 /* 关闭看门狗 */ 7 ldr r0, =0x53000000 8 ldr r1, =0 9 str r1, [r0] 10 11 /* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */ 12 /* LOCKTIME(0x4C000000) = 0xFFFFFFFF */ 13 ldr r0, =0x4C000000 14 ldr r1, =0xFFFFFFFF 15 str r1, [r0] 16 17 /* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */ 18 ldr r0, =0x4C000014 19 ldr r1, =0x5 20 str r1, [r0] 21 22 /* 设置CPU工作于异步模式 */ 23 mrc p15,0,r0,c1,c0,0 24 orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA 25 mcr p15,0,r0,c1,c0,0 26 27 /* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0) 28 * m = MDIV+8 = 92+8=100 29 * p = PDIV+2 = 1+2 = 3 30 * s = SDIV = 1 31 * FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M 32 */ 33 ldr r0, =0x4C000004 34 ldr r1, =(92<<12)|(1<<4)|(1<<0) 35 str r1, [r0] 36 37 /* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定 38 * 然后CPU工作于新的频率FCLK 39 */ 40 41 42 43 /* 设置内存: sp 栈 */ 44 /* 分辨是nor/nand启动 45 * 写0到0地址, 再读出来 46 * 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动 47 * 否则就是nor启动 48 */ 49 mov r1, #0 50 ldr r0, [r1] /* 读出原来的值备份 */ 51 str r1, [r1] /* 0->[0] */ 52 ldr r2, [r1] /* r2=[0] */ 53 cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */ 54 ldr sp, =0x40000000+4096 /* 先假设是nor启动 */ 55 moveq sp, #4096 /* nand启动 */ 56 streq r0, [r1] /* 恢复原来的值 */ 57 58 59 bl main 60 61 halt: 62 b halt 63
结果:
小结:
简要描述串行通信协议
通信协议,
即通信双方约定的一种协议,约定内容包括:数据格式,同步方式,传输速度,传输步骤,检纠错方式等。
串口通信协议:
通常分为同步协议与异步,此处描述的是异步串口通信协议,UART。
UART是异步,全双工的通信协议,以字符为单位,按照顺序逐位进行传送。有两根线,RXD接收数据、TXD发送数据;
传送每个字符都是以起始位开始,以停止位结束,传送时,数据的低位在前,高位在后;
在传输数据前,收发双方会对传输协议做统一规定:数据位长度—8位、停止位位数—1位、奇校验、传输速率115200bit/s
现以发送数据为例:
TxD在空闲时和停止位时都是高电平,当想要发送数据,先发送一个起始位,即改变TxD为低电平维持一位的时间,借着就
传输8位数据位与1位奇校验位与一个高电平的停止位,接受方检测到下降沿并确认为起始位后,就开始接收数据位,
校验位与停止位,且将停止位去掉,将数据位拼接为并行字节,经校验无错,就算接收一个字符完毕。发送端继续发送数据,接收端继续接收,直至数据传输完毕。
参考文档: