https://www.cnblogs.com/yangfengwu/p/11100552.html
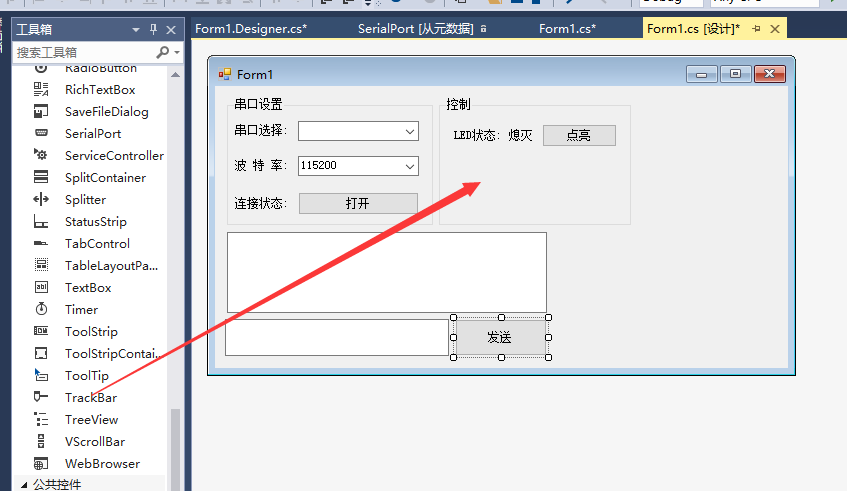
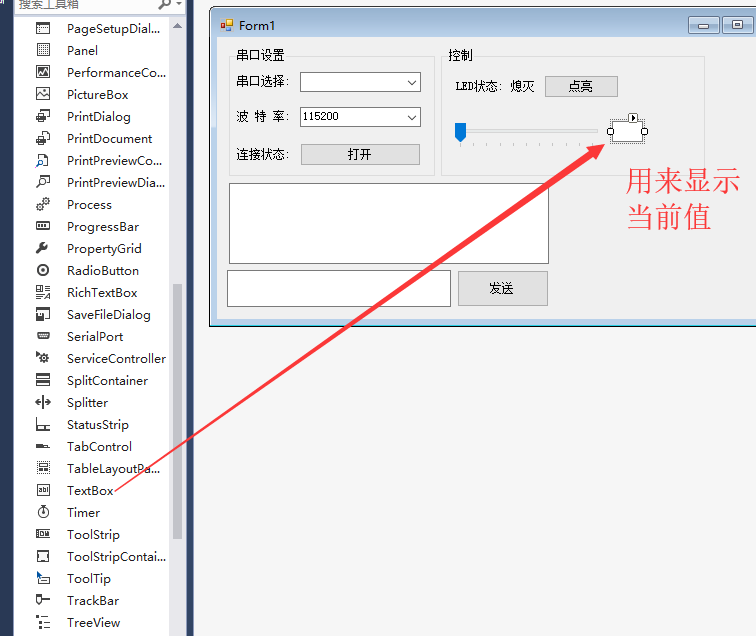
这节做个上位机控制Wi-Fi引脚输出的PWM占空比信号,灯的亮度就可以用上位机控制了
大家可以自己扩展程序控制舵机的旋转角度

双击
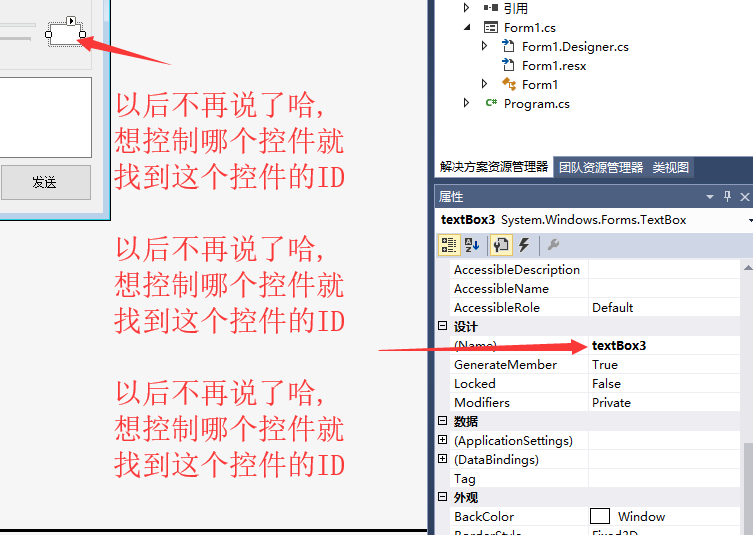
textBox3.Text = trackBar1.Value.ToString();//显示当前滑动条的值


然后规定下协议 注意为了大家以后做项目的通用性 数据传输用
讲一个知识点
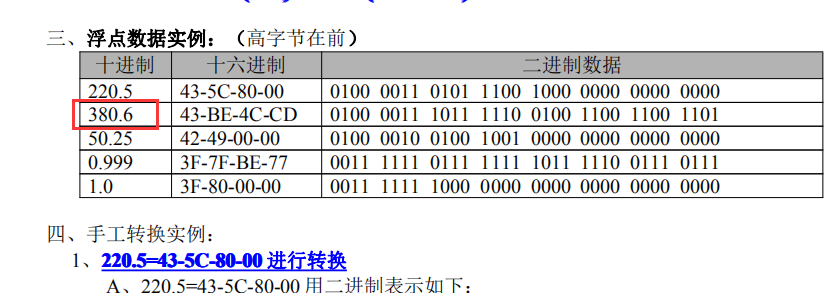
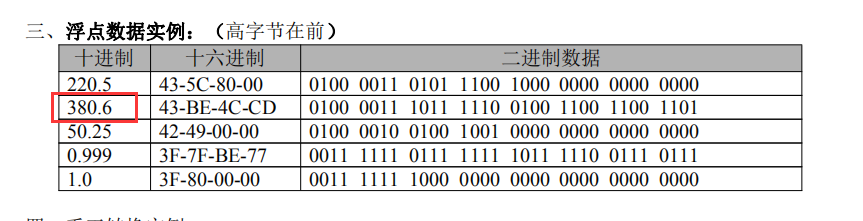
大家传输十进制数据怎么传输的,,传输浮点型数据怎么传输的 大家百度下IEEE754
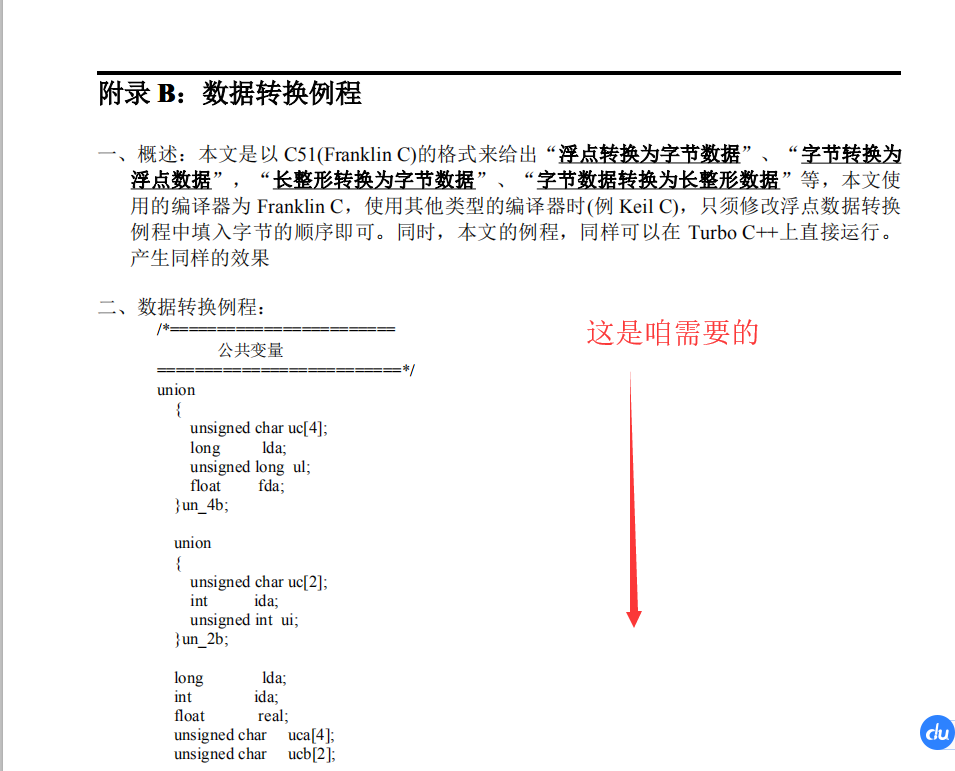

看一下用它做数据转换的妙用
我直接说了
假设你要发送220.5
这样做
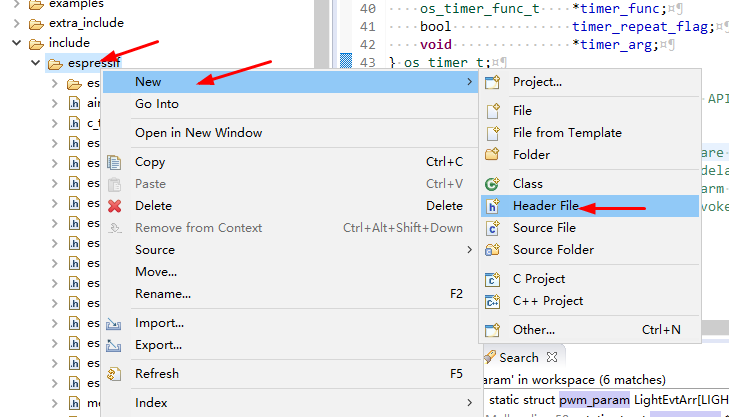
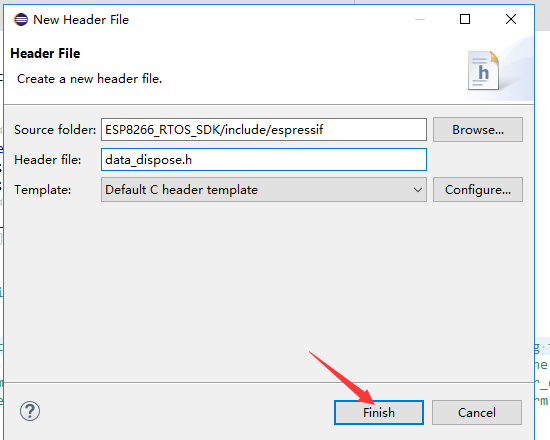
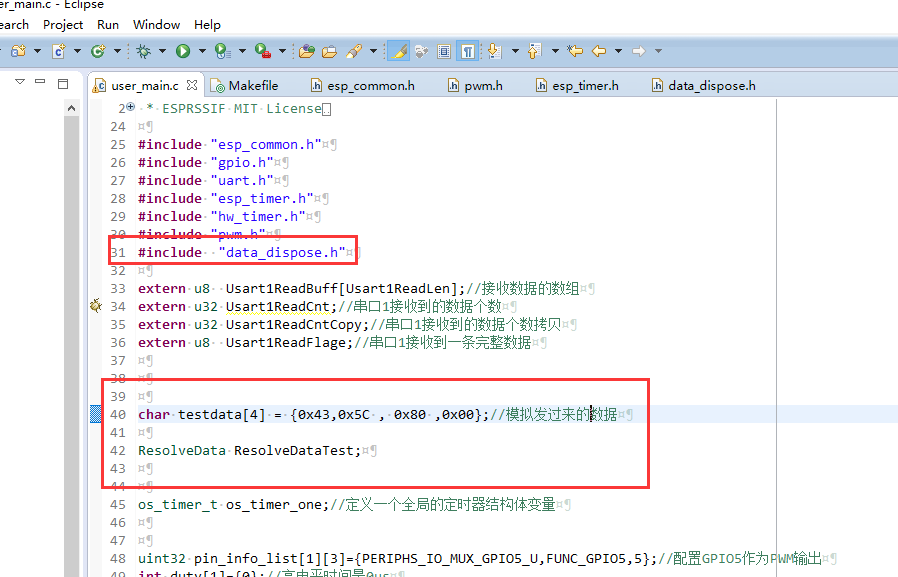
咱们新建一个data_dispose.h文件
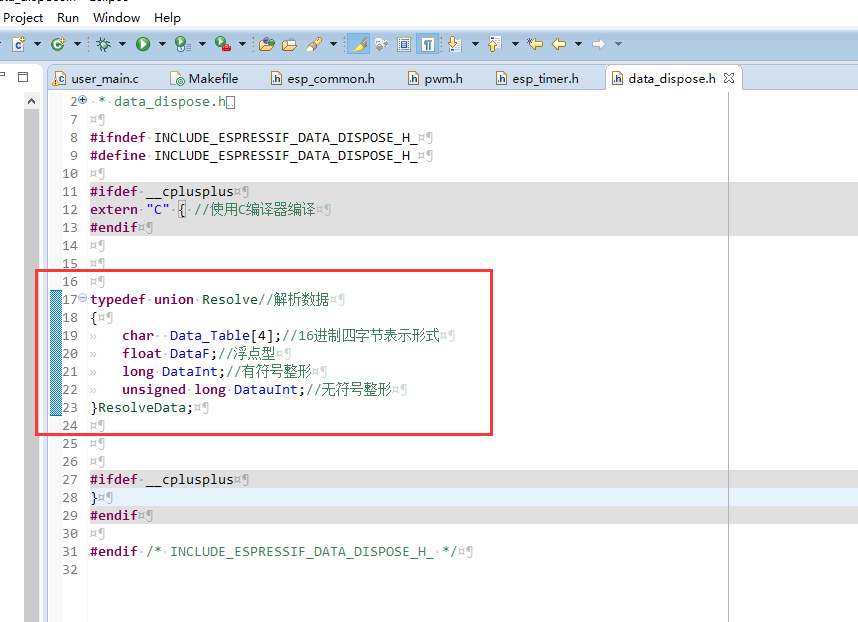
为了预防别人用我的源码在C++里面编译

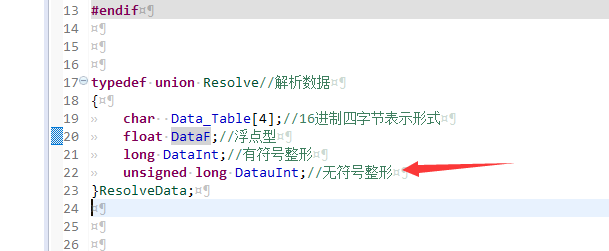
typedef union Resolve//解析数据 { char Data_Table[4];//16进制四字节表示形式 float DataF;//浮点型 long DataInt;//有符号整形 unsigned long DatauInt;//无符号整形 }ResolveData;
现在看使用
假设我采集了仪器仪表 仪器仪表就是IEEE754规范 发过来的220.5的 浮点型数据 0x43 0x5C 0x80 0x00
我现在需要转化为220.5
注意一件事情 0x43 0x5C 0x80 0x00 是高位数据在前
举个例子:259
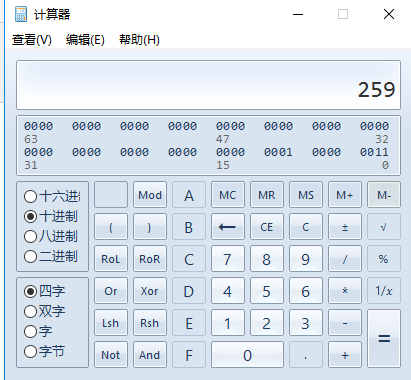
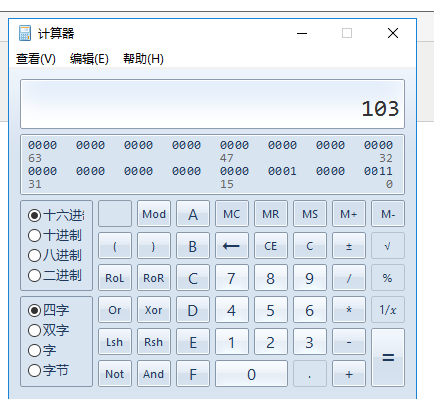
化为16进制表示是 0x01 0x03 这样排序就是高位在前
16进制怎么转成259呢 就是 0x01==1 1乘于2的8次方 再 加上 0x03 就是 3
1*256 + 3 = 259
如果计算完以后内存里面是这样存储的
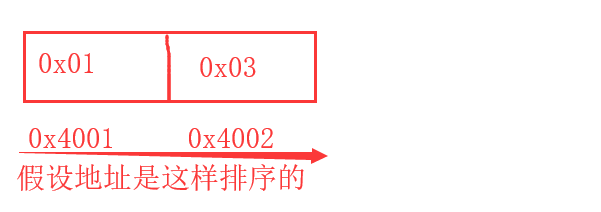
说个名词:大端模式
如果数据的高位存储在了存储地址的低位 数据的低位存储在了存储地址的高位 -----名称:大端模式
与之相反的是小端模式
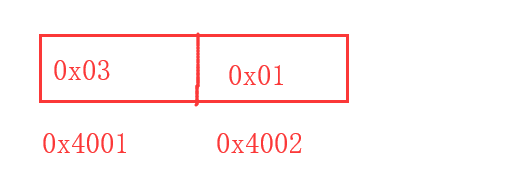
数据的低位存储在了存储地址的低位 数据的高位存储在了存储地址的高位 -----名称:小端模式
如果你做过仪器仪表,或者用过仪器仪表 应该知道,工业里面经常用到
然后提醒一下
51单片机存储数据是大端模式
STM32 是小端模式
电脑:小端模式
手机:好像是大端模式...忘记了
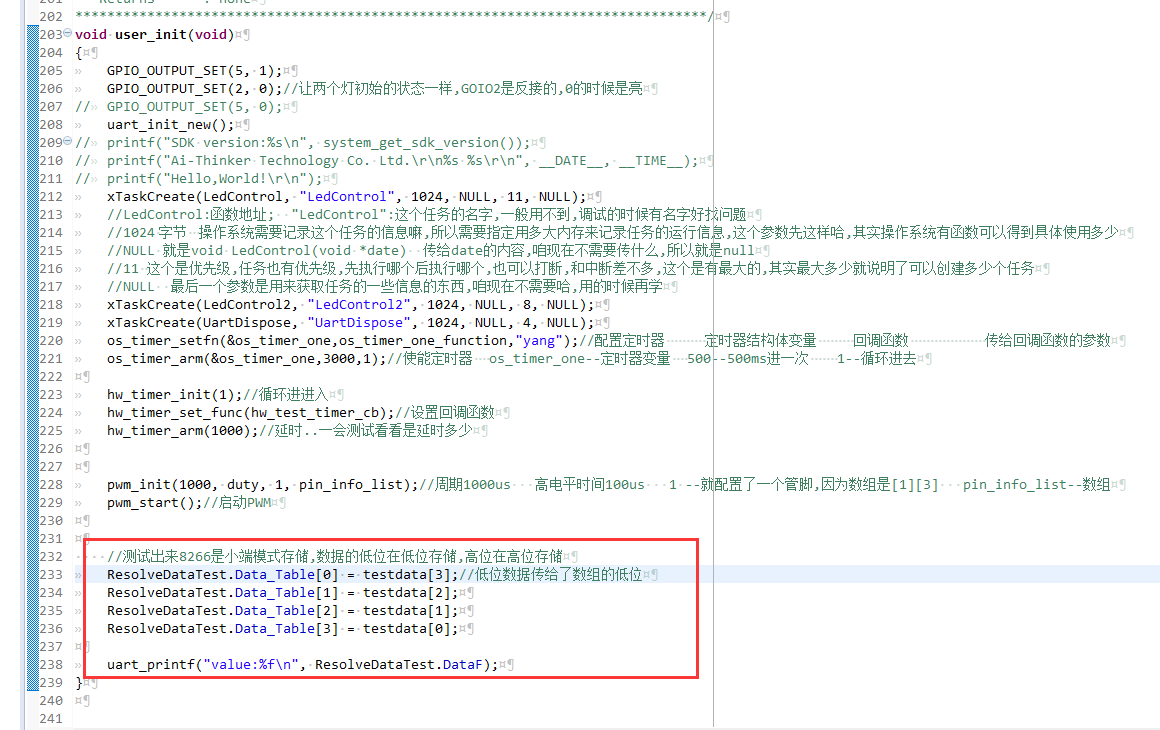
咱用的这个8266 小端模式
有人可能会问,具体怎么看出来的....
接着看
首先要记着
注意一件事情 0x43 0x5C 0x80 0x00 是高位数据在前 低位数据在后
刚才我测试了下,官方给的printf不支持打印浮点数.......
所以我自己写了个printf功能

void sendstring(unsigned char *string)//此处*string相当于数组 { while(*string!='�')//判断是否到字符串末尾 { USART_SendData(UART0, *string); string++; } } void uart_printf(const char *fmt,...)//和printf一样使用 { va_list ap; char string[200];//缓存,如果发送的超过此数,请自行增大 va_start(ap,fmt); vsprintf(string,fmt,ap);//此处也可以使用sprintf函数,用法差不多,稍加修改即可,此处略去 sendstring(string); va_end(ap); }
先打印看看
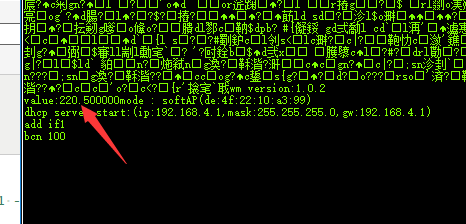
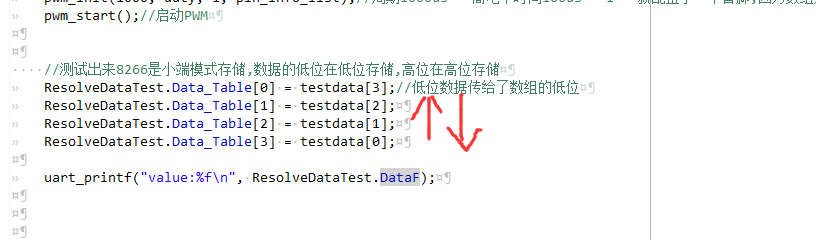
现在咱 把浮点型的数据转16进制数组存储
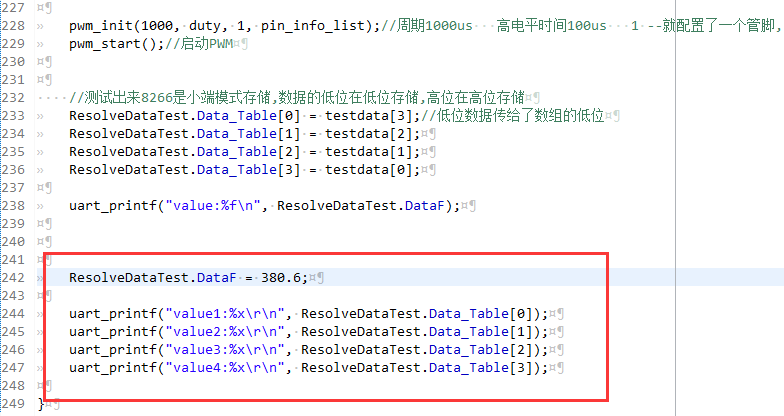
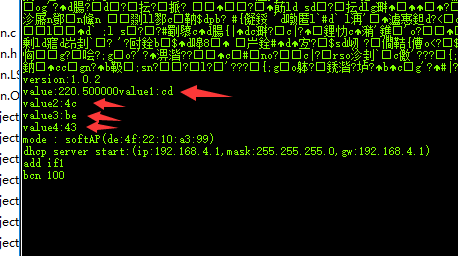
出来是 0xcd 0x4c 0xbe 0x43
由于8266是 小端模式 所以反着排的 低位在前 高位在后
上面主要说明的是 如何按照IEEE754规约 进行 16进制和浮点数的转化
其实测试大端 小端 很简单
你反正知道 259是 0x01 0x03 0x01是高位
你可以
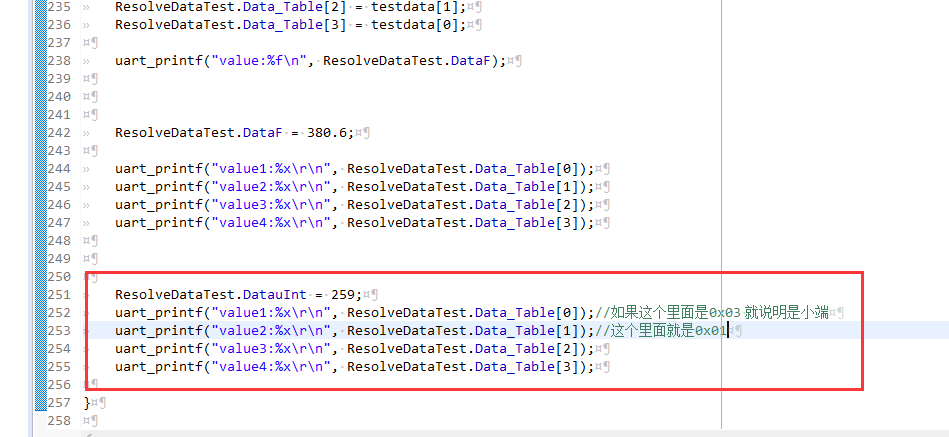

说明数据是低位存在低位 高位存在高位,所以是小端模式
其实只要知道就可以
真不行你解析的时候 一看解析不对颠倒一下
其余的还是放到下节吧,先消化消化