1.模型细化
vtk中实现网格细化的累有vtkLinearSubdivisionFilter、vtkLoopsubdivisionFilter、vtkButterflySubdivisionFilter。这三个类都继承自vtkInterpolatingSubdivisionFilter。具体的类的继承关系图如下图所示:vtkInterpolatingSunvisionFilter内部提供了SetNumberOfSubvisions()函数来设置细化的次数,其中每次细化后模型的三角面片的个数将是细化前的四倍。因此,在对网格模型进行n次细化后,该模型的面片个数将是原始模型面片数目的4*n倍。1.1 vtkLinearSubdivisionFilter
该类实现了一种线性细分算法,每次细分将每个三角形面片生成四个新的面片,该算法比较简单,速度快,但是细分后不能产生光滑的模型。1.2 vtkLoopSubdivisionFilter
该类实现的是Loop细分算法,每次细分会将一个三角面片生成4个三角面片,具体算法思想可以参考文献[1];该方法可以生成光滑的连续曲面,应用比较广泛。1.3 vtkButterflySubdivisionFilter
该类实现了蝶形细分算法,具体的算法思想可以参考文献[2].

2.网格模型细化实验
1 #include <vtkAutoInit.h>
2 VTK_MODULE_INIT(vtkRenderingOpenGL);
3 VTK_MODULE_INIT(vtkRenderingFreeType);
4 VTK_MODULE_INIT(vtkInteractionStyle);
5
6 #include <vtkSmartPointer.h>
7 #include <vtkPolyDataReader.h>
8 #include <vtkPolyData.h>
9 #include <vtkLinearSubdivisionFilter.h>
10 #include <vtkLoopSubdivisionFilter.h>
11 #include <vtkButterflySubdivisionFilter.h>
12 #include <vtkPolyDataMapper.h>
13 #include <vtkActor.h>
14 #include <vtkRenderer.h>
15 #include <vtkRenderWindow.h>
16 #include <vtkCamera.h>
17 #include <vtkRenderWindowInteractor.h>
18
19 int main()
20 {
21 //读数据
22 vtkSmartPointer<vtkPolyDataReader> reader =
23 vtkSmartPointer<vtkPolyDataReader>::New();
24 reader->SetFileName("fran_cut.vtk");
25 reader->Update();
26
27 vtkSmartPointer<vtkPolyData> orig = reader->GetOutput();
28 std::cout << "original" << "-----------------------" << std::endl;
29 std::cout << "模型点数为: " << orig->GetNumberOfPoints() << std::endl;
30 std::cout << "模型面数为: " << orig->GetNumberOfPolys() << std::endl;
31 //线性网格细分滤波器
32 vtkSmartPointer<vtkLinearSubdivisionFilter> linear =
33 vtkSmartPointer<vtkLinearSubdivisionFilter>::New();
34 linear->SetInputData(orig);
35 linear->SetNumberOfSubdivisions(4);
36 linear->Update();
37
38 vtkSmartPointer<vtkPolyData> linearInfo = linear->GetOutput();
39 std::cout << "linear" << "-----------------------" << std::endl;
40 std::cout << "模型点数为: " << linearInfo->GetNumberOfPoints() << std::endl;
41 std::cout << "模型面数为: " << linearInfo->GetNumberOfPolys() << std::endl;
42
43 //Loop网格细分滤波器
44 vtkSmartPointer<vtkLoopSubdivisionFilter> loop =
45 vtkSmartPointer<vtkLoopSubdivisionFilter>::New();
46 loop->SetInputData(orig);
47 loop->SetNumberOfSubdivisions(4);
48 loop->Update();
49
50 vtkSmartPointer<vtkPolyData> loopInfo = loop->GetOutput();
51 std::cout << "loop" << "-----------------------" << std::endl;
52 std::cout << "模型点数为: " << loopInfo->GetNumberOfPoints() << std::endl;
53 std::cout << "模型面数为: " << loopInfo->GetNumberOfPolys() << std::endl;
54
55 //butterfly网格细分滤波器
56 vtkSmartPointer<vtkButterflySubdivisionFilter> butterfly =
57 vtkSmartPointer<vtkButterflySubdivisionFilter>::New();
58 butterfly->SetInputData(orig);
59 butterfly->SetNumberOfSubdivisions(4);
60 butterfly->Update();
61
62 vtkSmartPointer<vtkPolyData> butterflyInfo = butterfly->GetOutput();
63 std::cout << "butterfly" << "-----------------------" << std::endl;
64 std::cout << "模型点数为: " << butterflyInfo->GetNumberOfPoints() << std::endl;
65 std::cout << "模型面数为: " << butterflyInfo->GetNumberOfPolys() << std::endl;
66
67 vtkSmartPointer<vtkPolyDataMapper> origMapper =
68 vtkSmartPointer<vtkPolyDataMapper>::New();
69 origMapper->SetInputData(orig);
70 vtkSmartPointer<vtkActor> origActor =
71 vtkSmartPointer<vtkActor>::New();
72 origActor->SetMapper(origMapper);
73
74 vtkSmartPointer<vtkPolyDataMapper> linearMapper =
75 vtkSmartPointer<vtkPolyDataMapper>::New();
76 linearMapper->SetInputData(linear->GetOutput());
77 vtkSmartPointer<vtkActor> linearActor =
78 vtkSmartPointer<vtkActor>::New();
79 linearActor->SetMapper(linearMapper);
80
81 vtkSmartPointer<vtkPolyDataMapper> loopMapper =
82 vtkSmartPointer<vtkPolyDataMapper>::New();
83 loopMapper->SetInputData(loop->GetOutput());
84 vtkSmartPointer<vtkActor> loopActor =
85 vtkSmartPointer<vtkActor>::New();
86 loopActor->SetMapper(loopMapper);
87
88 vtkSmartPointer<vtkPolyDataMapper> butterflyMapper =
89 vtkSmartPointer<vtkPolyDataMapper>::New();
90 butterflyMapper->SetInputData(butterfly->GetOutput());
91 vtkSmartPointer<vtkActor> butterflyActor =
92 vtkSmartPointer<vtkActor>::New();
93 butterflyActor->SetMapper(butterflyMapper);
94 //
95 double ltView[4] = { 0, 0, 0.5, 0.5 };
96 double rtView[4] = { 0.5, 0, 1, 0.5 };
97 double lbView[4] = { 0, 0.5, 0.5, 1 };
98 double rbView[4] = { 0.5, 0.5, 1, 1 };
99
100 vtkSmartPointer<vtkRenderer> origRender =
101 vtkSmartPointer<vtkRenderer>::New();
102 origRender->SetViewport(ltView);
103 origRender->AddActor(origActor);
104 origRender->SetBackground(1, 0, 0);
105
106 vtkSmartPointer<vtkRenderer> linearRender =
107 vtkSmartPointer<vtkRenderer>::New();
108 linearRender->SetViewport(rtView);
109 linearRender->AddActor(linearActor);
110 linearRender->SetBackground(0, 1, 0);
111
112 vtkSmartPointer<vtkRenderer> loopRender =
113 vtkSmartPointer<vtkRenderer>::New();
114 loopRender->SetViewport(lbView);
115 loopRender->AddActor(loopActor);
116 loopRender->SetBackground(0, 0, 1);
117
118 vtkSmartPointer<vtkRenderer> butterflyRender =
119 vtkSmartPointer<vtkRenderer>::New();
120 butterflyRender->SetViewport(rbView);
121 butterflyRender->AddActor(butterflyActor);
122 butterflyRender->SetBackground(0, 0, 0);
123 //
124 vtkSmartPointer<vtkRenderWindow> rw =
125 vtkSmartPointer<vtkRenderWindow>::New();
126 rw->AddRenderer(origRender);
127 rw->AddRenderer(linearRender);
128 rw->AddRenderer(loopRender);
129 rw->AddRenderer(butterflyRender);
130 rw->SetSize(640, 640);
131 rw->SetWindowName("PolyData Subdivision");
132
133 origRender->GetActiveCamera()->SetPosition(0, -1, 0);
134 origRender->GetActiveCamera()->SetFocalPoint(0, 0, 0);
135 origRender->GetActiveCamera()->SetViewUp(0, 0, 1);
136 origRender->GetActiveCamera()->Azimuth(30);
137 origRender->GetActiveCamera()->Elevation(30);
138 origRender->ResetCamera();//刷新照相机
139 linearRender->SetActiveCamera(origRender->GetActiveCamera());
140 loopRender->SetActiveCamera(origRender->GetActiveCamera());
141 butterflyRender->SetActiveCamera(origRender->GetActiveCamera());
142
143 vtkSmartPointer<vtkRenderWindowInteractor> rwi =
144 vtkSmartPointer<vtkRenderWindowInteractor>::New();
145 rwi->SetRenderWindow(rw);
146 rwi->Start();
147 rw->Render();
148
149 return 0;
150 }
输出结果:
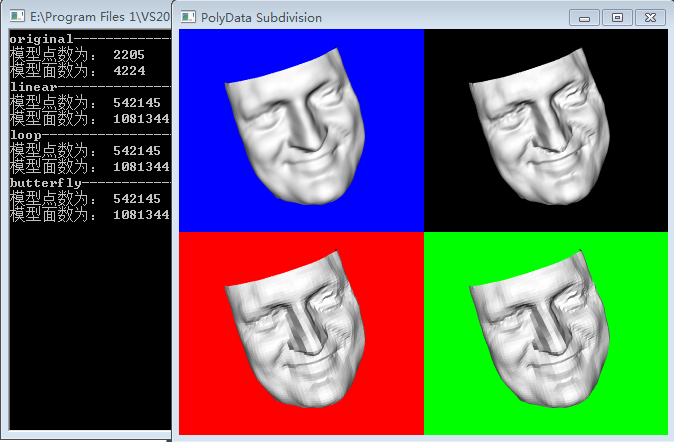
红色视窗为原始三角网格模型,绿色视窗采用了线性细分算法;蓝色视窗采用Loop细分算法;黑色视窗采用了Butterfly细分算法。
鼻子部位的细节图:
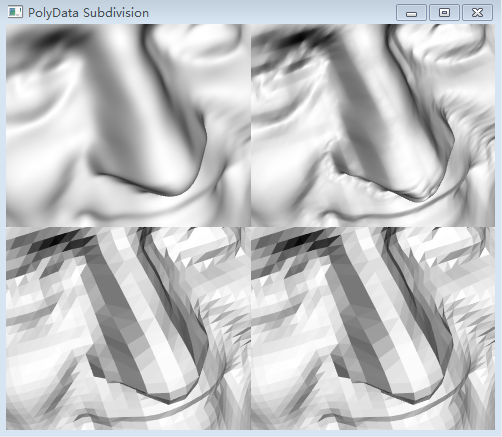
从上面结果上看,我们可以看出:线性细分效果似乎没有起到多大作用??!Loop细分结果得到了很光滑的曲面,Butterfly细分在细节部分处理的并不很理想。
注意事项 :
所有模型细化算子仅对三角网格数据有效,因此在处理多边形数据时,需要通过VTKTriangleFilter将多边形网格转换为三角网格才能处理。