主要内容:
一、回顾
还记得下面的图像吧。首先使用NiTE中间件获得骨骼数据;然后再利用到NiTE中的函数得到的深度图像mUserFrame.getDepthFrame();最后将骨骼坐标点映射到深度图像中。

二、结合彩色图像显示骨骼坐标信息
深度数据毕竟不好看,而且显示效果不好,所以今天参照他人的代码和自身之前的博文“谈谈NITE 2与OpenCV结合的第二个程序(提取人体骨骼坐标)”和“谈谈OpenNI 2与OpenCV结合的第一个程序”整理结合,将骨骼坐标信息显示到彩色图像中,具体不做分析了,直接上代码:
// YeNite2SimpleUsingOpenCV.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <iostream> // OpenCV 头文件 #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <OpenNI.h> #include <NiTE.h> using namespace std; using namespace openni; using namespace nite; int main( int argc, char **argv ) { // 初始化OpenNI OpenNI::initialize(); // 打开Kinect设备 Device mDevice; mDevice.open( ANY_DEVICE ); // 创建深度数据流 VideoStream mDepthStream; mDepthStream.create( mDevice, SENSOR_DEPTH ); // 设置VideoMode模式 VideoMode mDepthMode; mDepthMode.setResolution( 640, 480 ); mDepthMode.setFps( 30 ); mDepthMode.setPixelFormat( PIXEL_FORMAT_DEPTH_1_MM ); mDepthStream.setVideoMode(mDepthMode); // 同样的设置彩色数据流 VideoStream mColorStream; mColorStream.create( mDevice, SENSOR_COLOR ); // 设置VideoMode模式 VideoMode mColorMode; mColorMode.setResolution( 640, 480 ); mColorMode.setFps( 30 ); mColorMode.setPixelFormat( PIXEL_FORMAT_RGB888 ); mColorStream.setVideoMode( mColorMode); // 设置深度图像映射到彩色图像 mDevice.setImageRegistrationMode( IMAGE_REGISTRATION_DEPTH_TO_COLOR ); // 为了得到骨骼数据,先初始化NiTE NiTE::initialize(); // 创建用户跟踪器 UserTracker mUserTracker; mUserTracker.create( &mDevice ); // Control the smoothing factor of the skeleton joints. Factor should be between 0 (no smoothing at all) and 1 (no movement at all) mUserTracker.setSkeletonSmoothingFactor( 0.1f ); // 创建User彩色图像显示 cv::namedWindow( "User Image", CV_WINDOW_AUTOSIZE ); // 环境初始化后,开始获取深度数据流和彩色数据流 mDepthStream.start(); mColorStream.start(); while( true ) { // 创建OpenCV::Mat,用于显示彩色数据图像 cv::Mat cImageBGR; // 读取彩色图像数据帧信息流 VideoFrameRef mColorFrame; mColorStream.readFrame( &mColorFrame ); // 将彩色数据流转换为OpenCV格式,记得格式是:CV_8UC3(含R\G\B) const cv::Mat mImageRGB( mColorFrame.getHeight(), mColorFrame.getWidth(), CV_8UC3, (void*)mColorFrame.getData() ); // RGB ==> BGR cv::cvtColor( mImageRGB, cImageBGR, CV_RGB2BGR ); // 读取User用户数据帧信息流 UserTrackerFrameRef mUserFrame; mUserTracker.readFrame( &mUserFrame ); // 得到Users信息 const nite::Array<UserData>& aUsers = mUserFrame.getUsers(); for( int i = 0; i < aUsers.getSize(); ++ i ) { const UserData& rUser = aUsers[i]; // 检查用户状态 if( rUser.isNew() ) { // 开始对该用户的骨骼跟踪 mUserTracker.startSkeletonTracking( rUser.getId() ); } if( rUser.isVisible() ) { // 得到用户骨骼数据 const Skeleton& rSkeleton = rUser.getSkeleton(); // 检查骨骼状态是否为“跟踪状态” if( rSkeleton.getState() == SKELETON_TRACKED ) { // 得到15个骨骼数据
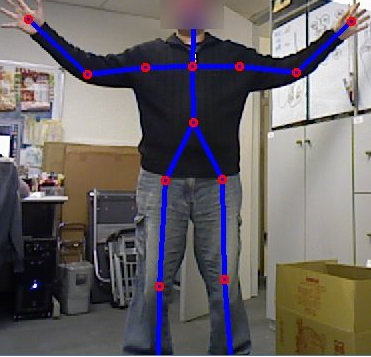
SkeletonJoint aJoints[15]; aJoints[ 0] = rSkeleton.getJoint( JOINT_HEAD ); aJoints[ 1] = rSkeleton.getJoint( JOINT_NECK ); aJoints[ 2] = rSkeleton.getJoint( JOINT_LEFT_SHOULDER ); aJoints[ 3] = rSkeleton.getJoint( JOINT_RIGHT_SHOULDER ); aJoints[ 4] = rSkeleton.getJoint( JOINT_LEFT_ELBOW ); aJoints[ 5] = rSkeleton.getJoint( JOINT_RIGHT_ELBOW ); aJoints[ 6] = rSkeleton.getJoint( JOINT_LEFT_HAND ); aJoints[ 7] = rSkeleton.getJoint( JOINT_RIGHT_HAND ); aJoints[ 8] = rSkeleton.getJoint( JOINT_TORSO ); aJoints[ 9] = rSkeleton.getJoint( JOINT_LEFT_HIP ); aJoints[10] = rSkeleton.getJoint( JOINT_RIGHT_HIP ); aJoints[11] = rSkeleton.getJoint( JOINT_LEFT_KNEE ); aJoints[12] = rSkeleton.getJoint( JOINT_RIGHT_KNEE ); aJoints[13] = rSkeleton.getJoint( JOINT_LEFT_FOOT ); aJoints[14] = rSkeleton.getJoint( JOINT_RIGHT_FOOT ); // 将骨骼3D坐标转换为深度坐标下骨骼位置坐标,并保存在数组中 cv::Point2f aPoint[15]; for( int s = 0; s < 15; ++ s ) { const Point3f& rPos = aJoints[s].getPosition(); mUserTracker.convertJointCoordinatesToDepth( rPos.x, rPos.y, rPos.z, &(aPoint[s].x), &(aPoint[s].y) ); } // 在彩色图像中画出骨骼间的连接线 cv::line( cImageBGR, aPoint[ 0], aPoint[ 1], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 1], aPoint[ 2], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 1], aPoint[ 3], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 2], aPoint[ 4], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 3], aPoint[ 5], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 4], aPoint[ 6], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 5], aPoint[ 7], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 1], aPoint[ 8], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 8], aPoint[ 9], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 8], aPoint[10], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[ 9], aPoint[11], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[10], aPoint[12], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[11], aPoint[13], cv::Scalar( 255, 0, 0 ), 3 ); cv::line( cImageBGR, aPoint[12], aPoint[14], cv::Scalar( 255, 0, 0 ), 3 ); // 同样的在彩色图像中骨骼位置上画“圆” for( int s = 0; s < 15; ++ s ) { if( aJoints[s].getPositionConfidence() > 0.5 ) cv::circle( cImageBGR, aPoint[s], 3, cv::Scalar( 0, 0, 255 ), 2 ); else cv::circle( cImageBGR, aPoint[s], 3, cv::Scalar( 0, 255, 0 ), 2 ); } } } } // 显示图像 cv::imshow( "User Image", cImageBGR ); // 按键“q”退出循环 if( cv::waitKey( 1 ) == 'q' ) break; } // 先销毁User跟踪器 mUserTracker.destroy(); // 销毁彩色数据流和深度数据流 mColorStream.destroy(); mDepthStream.destroy(); // 关闭Kinect设备 mDevice.close(); // 关闭NITE和OpenNI环境 NiTE::shutdown(); OpenNI::shutdown(); return 0; }
效果图:
三、总结
到目前为止基本完成了对OpenNI2和NiTE2的基本使用的介绍,对于OpenNI 2和NiTE2中采用的基于事件编程和一些不常用到的函数将在后面进一步介绍。
关注体感设备消息推送,即时收取体感设备(Kinect、Xtion等)最新内容和软件开发等信息。 微信添加好友:“KinectInformation”,或者扫一扫:
