- 题目描述
给定一个二叉搜索树, 找到该树中两个指定节点的最近公共祖先。 百度百科中最近公共祖先的定义为:“对于有根树 T 的两个结点 p、q,最近公共祖先表示为一个结点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的祖先)。” 例如,给定如下二叉搜索树: root = [6,2,8,0,4,7,9,null,null,3,5]
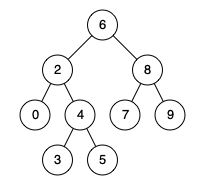
示例 1: 输入: root = [6,2,8,0,4,7,9,null,null,3,5], p = 2, q = 8 输出: 6 解释: 节点 2 和节点 8 的最近公共祖先是 6。 示例 2: 输入: root = [6,2,8,0,4,7,9,null,null,3,5], p = 2, q = 4 输出: 2 解释: 节点 2 和节点 4 的最近公共祖先是 2, 因为根据定义最近公共祖先节点可以为节点本身。 说明: 所有节点的值都是唯一的。 p、q 为不同节点且均存在于给定的二叉搜索树中。
- 解法一:迭代
这道题需要注意以下几个点:
- 求解对象是二叉搜索树,二叉搜索树的性质的左子树所有叶子节点均小于root,右子树的叶子节点均大于root。
- 祖先的定义:若节点P在root的左(右)子树中,或P=root,则称root是p的祖先。
- 最近公共祖先的定义:设节点root是节点p和节点q的某公共祖先,所其左子节点root.left和root.right都不是p和q的公共祖先,那么root是p和q的最近公共祖先。
- 若root是p和q的公共祖先,那么一定有以下3种情况之一:
- p和q在root的子树中,且p和q分别在异侧
- p=root,q在p的左子树或右子树中
- q = root,p在q的左子树或右子树中
那么这个问题就很简单了,我们通过二叉搜索树的性质,直接根据p和q的节点值大小来判断这个root在左子树还是右子树。
首先我们令p小于q(这是为了减少比较次数),当root大于p时,说明最小公共祖先在左子树,当root大于q时,说明最小公共祖先在右子树,否则,p和q在root左右两侧或者p或者q某一个等于root, 则说明找到了 最小公共祖先。
class Solution: def lowestCommonAncestor(self, root: 'TreeNode', p: 'TreeNode', q: 'TreeNode') -> 'TreeNode': if p.val > q.val: #p 左子节点,q右子节点 p, q = q, p while root: if root.val > q.val: root = root.left elif root.val < p.val: root = root.right else: break return root
可能下面的更容易理解:
class Solution: def lowestCommonAncestor(self, root: 'TreeNode', p: 'TreeNode', q: 'TreeNode') -> 'TreeNode': while root: if root.val < p.val and root.val < q.val: # p,q 都在 root 的右子树中 root = root.right # 遍历至右子节点 elif root.val > p.val and root.val > q.val: # p,q 都在 root 的左子树中 root = root.left # 遍历至左子节点 else: break return root
时间复杂度O(N)
空间复杂度O(1)
- 解法二:递归
这道题的实质就是在查找找左右子树满足:
- p和q在root的子树中,且p和q分别在异侧
- p=root,q在p的左子树或右子树中
- q = root,p在q的左子树或右子树中
因此,我们可直接递归:
当 p, q都在 root的 右子树 中,则开启递归 root.right并返回;
否则,当 p, q都在 root的 左子树 中,则开启递归 root.left并返回;
class Solution: def lowestCommonAncestor(self, root: 'TreeNode', p: 'TreeNode', q: 'TreeNode') -> 'TreeNode': if p.val < root.val and q.val < root.val: return self.lowestCommonAncestor(root.left, p, q) if p.val > root.val and q.val > root.val: return self.lowestCommonAncestor(root.right, p, q) return root
时间复杂度O(N)
空间复杂度O(1)