最近看到一篇paper,讲的是对齐之后的一种新的位姿估计的算法,文章题目是An Efficient Solution to the Homography-Based Relative Pose Problem With a Common Reference Direction
文中引用了一篇文章:“Homography Based Egomotion Estimation with a Common Direction”,感觉还挺有意思
文中的背景是,现在很多相机都能够获取imu的信息,根据imu来获取重力的方向,根据重力的方向,可以将相机进行对齐,所谓对齐的意思是,将某一个轴对齐到同一方向,然后再利用一种更加方便的方法求取homography,进而恢复出r和t
对齐大致如下图
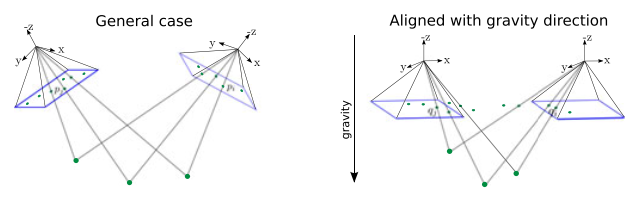
在对齐之后,作者一共讨论三种情况,来求取homography以及根据求解得到的homography来恢复r和t
假设已经沿着z轴进行对齐,实际上旋转矩阵R只剩一个自由度进行估计,R可以表示为如下形式
这个时候homography和r与t的关系也变得比较简单

根据如上公式,作者一共讨论了四种情况,关于这四种情况,我们逐一讨论,
第一种情况是,已知地面上的两个点,即可求取homography,也能够得到r和t
第二种情况是,对应点在垂直于地面上的竖直平面上,这样的点需要两个,并且要求已知竖直平面的法向量
第三种情况和第二种情况类似,已知竖直平面上的2.5个点,并且不要求这个数值平面的法向量已知
第四种情况是,任意平面,发向量已经知道
论文中讨论的非常细致,并且我复现了case1和case3,代码 https://github.com/XGBoost/homography2rt
针对文中的坑我还是有必要说一下,在复现case3的时候,因为求解的多项是四次的,而且化简起来非常的复杂,所以,我采取了matlab符号求解的方式,
哎妈是真的慢,有多慢呢,估计速度差1000倍吧。
detail如下,
我有一个一元四次方程,并且这个方程的系数非常复杂,以至于很难化简,但是在matlab中你可以用符号来定义未知变量,从而让程序自己化简,
大概如下
https://github.com/XGBoost/homography2rt/blob/master/pami3findHomography.m#L50
syms lambda; h = temp11+lambda*temp22; f = h(1)^2*h(6)^2-2*h(1)*h(2)*h(5)*h(6)+h(2)^2*h(5)^2+h(3)^2*h(6)^2-2*h(3)*h(4)*h(5)*h(6)+h(4)^2*h(5)^2-h(5)^2-h(6)^2; root2 = double(solve(f))
但是,如果能够不怕麻烦,写出四次方程的系数,用roots函数实际上很快。