CYCADA: cycle-consistent adversaial domain adaption阅读笔记
之前方法是在feature space进行domain adaption,来发现domain invariant representations, 但是这种方法很难可视化,而且某些时候不能够获取pixel-level和low-level domain shift. 最近的gan在使用cycle一致性约束的GAN在不同的domain上进行图片mapping取得了很好的效果,即使没有使用aligned image pairs.
作者这篇文章提出了一种新的通过判别方式训练的Cycle-Consistent Adversarial Domain Adaption model. CYCADA能够在pixel-level和feature level上同时adapt,通过添加cycle-consistency约束的同时,还会使用task相关的loss,并且不需要对其的pairs。作者的这种settting可以用到很多不同的任务。达到了比较好的效果。
作者的方法
假设source data为 (X_S), source label为(Y_S), target data为(X_T), 但是没有target label,UDA的目标是学习一个模型(f)使得能够准确地预测出来target data (X_T).
因为source data上有label,所以source model (f_S)在source data上可以学到。对应的就是(K)个类别的使用二值交叉熵分类问题:
(sigma)表示softmax函数。但是在source domain熵表现很好的(f_S),因为domain shift,在targetdomain会掉点。为了缓解这种domain shift, 作者follow之前的对抗适应方式,通过学习在domain之间map samples,这样的话,一个adversaial discriminator就不能够区分来自于哪个domain。通过mapping samples到一个common space,作者说能够让模型在source domain上进行学习,还能够泛化到target data上。
adversarial objective
基于此,作者提出了一个generator,来mapping from source to target (G_{S ightarrow T}). 通过训练(G_{S ightarrow T})来产生target data,以及foll adversarial discriminator (D_T). 反过来,adversaial discriminator尝试将real target data从source target data充区分出来,对应的loss函数为
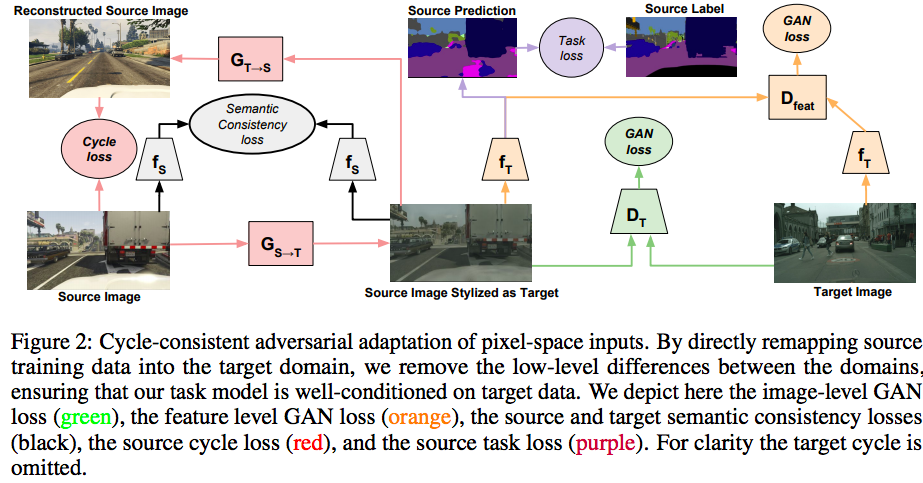
上面这个公式的意义是,给定source data,能够确保(G_{S ightarrow T})产生convincing target samples。相应的,这种能够在不同domain map samples的能力能够让我们通过优化函数(mathcal{L}_{ ext {task }}left(f_{T}, G_{S ightarrow T}left(X_{S} ight), Y_{S} ight))学习到一个target model (f_T),对应下图的绿色部分
cycle consistency
作者说上述这种方式训练的时候不稳定,而且容易失败。作者的原话如下
Although the GAN loss in Equation 2 ensures that (G_{S ightarrow T}) for some xs will resemble data drawn from (X_T), there is no way to guarantee that (G_{S ightarrow T}) preserves the structure or content of the original sample (x_s)
为了能够保证或者是encourage source content在conversion的过程中能够保留,作者在他们的adaption method添加了cycle-consistency的约束。如上图中的红色部分。同时作者也提出了利用another mapping from target to source (G_{T ightarrow S}),也是利用GAN loss (mathcal{L}_{mathrm{GAN}}left(G_{T ightarrow S}, D_{S}, X_{S}, X_{T} ight)) 来训练
作者要求的是,从source 到target 然后再从合成的target 到source应该是要和source一致的,所以有个约束是:
以及
作者使用(mathcal{L}_1) norm来进行约束,定义如下cycle consistency loss
semantic consistency
同时,作者说他们能够接触到source labeled data,在image translation前后,作者显式的保留高的语义一致性。
作者通过一个预训练的网络(f_S),固定这个网络的权重,用这个模型作为一个noisy labeler。作者希望的是,在translation前后,都希望对于迁移的像素能够用一个fixed classifier (f) 进行中正确的分类,给定一个输入(X), 用classifer (f)进行分类之后得到的输出为
于是,作者定义了一个在图像translation前后的语义一致性的loss:
上图中的 黑色部分。
feature level
通过上述三种方式,作者引入了cycle consistency, semantic consistency,以及adversarial objectives来得到最终的target model。作为一个pixel-level method,adversarial项包含了一个判别器,这个判别器能够区分两种图像,比如从source迁移过来的或者是真实的target。自然而然的可以考虑在feature level进行判别,即一个feature 来自于从soruce domain生成的或者是real target的feature,如上襦的 橘色部分。feature level上的loss定义如下
所以总共的loss如下:
最后的优化目标变成: