multi-robot system
经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发。本篇博客是假定读者已经学习完了全部ros tutorials的
Beginner Level 和 Intermediate Level 。
目录:
同一电脑运行多机器人节点
现在我们开始尝试运行两个相同的turtlesim节点(nodes),打开三个运行如下命令:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtlesim_node
得到的结果如下:
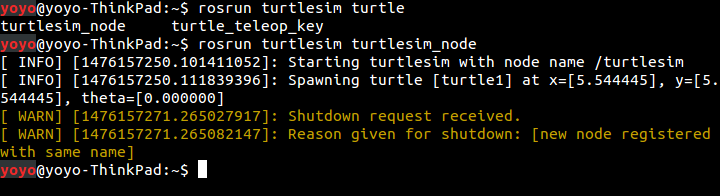
第一次运行的turtlesim_node 被终止了。ros不允许相同名字的节点同时运行,如果第二个节点运行,第一个会被自动终结。
参数重映射(Remapping Arguments):一个节点中的任何ROS名称可以在命令行重映射,这是ROS中的一个非常重要且强大的特征。
有了这个特征,我们就可以实现在同一台电脑中控制多个节点做不同的事了:
如果要同时运行多个节点的话,是一定要改名字的,一下介绍两种改名字的方法:
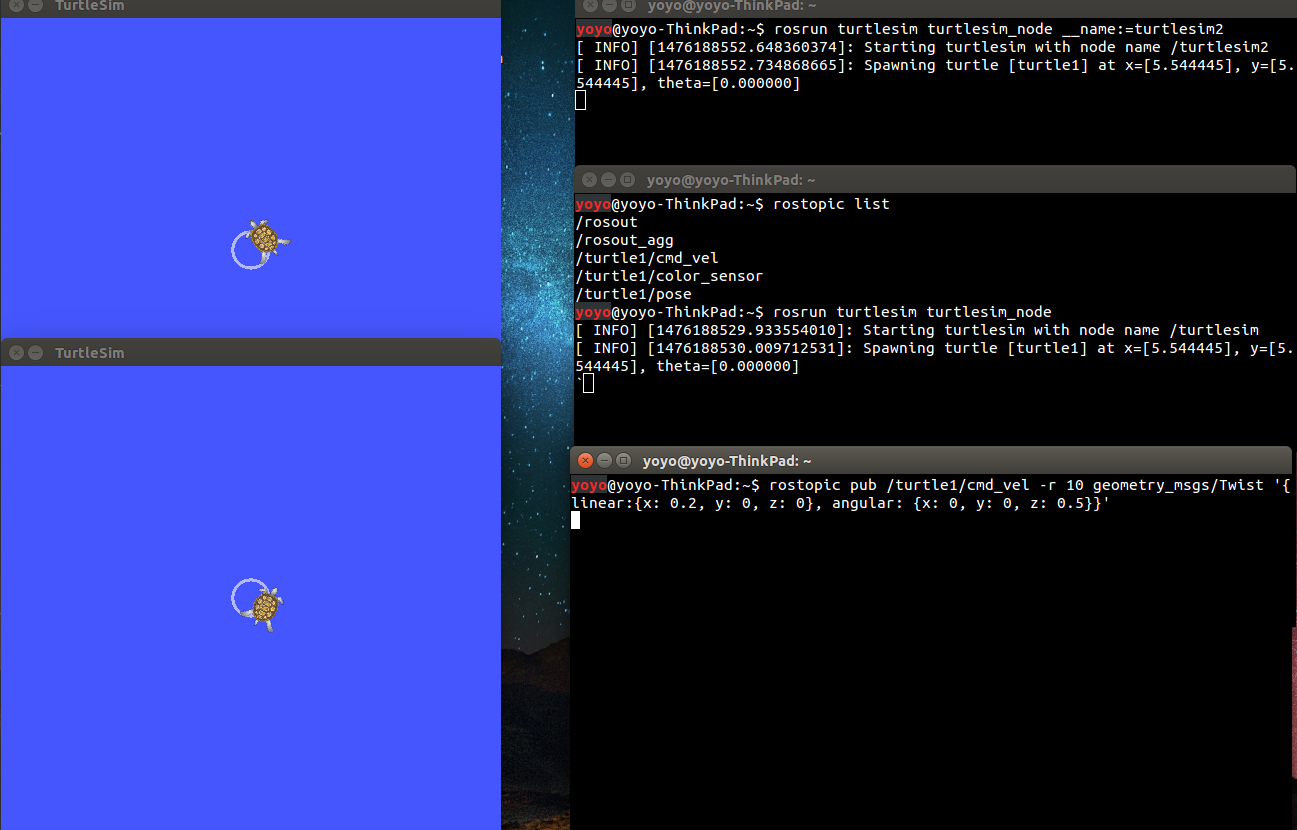
第一种:直接在命令行改名字
更改第二个命令:
rosrun turtlesim turtlesim_node __name:=turtlesim2
再运行:
rostopic pub /turtle1/cmd_vel -r 10 geometry_msgs/Twist '{linear:{x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
现在可以实现同时控制两个turtlesim_node了

第二种:使用launch文件
创建 multi_turtlesim.launch
<launch>
<group ns="sim1">
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
<node name="controller" pkg="turtlesim" type="draw_square"/>
</group>
<group ns="sim2">
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
<node name="controller" pkg="turtlesim" type="draw_square"/>
</group>
</launch>
我们直接在launch文件中更改了节点的namespaces,运行rqt_graph可以更直接的看到我i们的修改:

如果要实现多个节点受不同的控制,创建 remapping_turtlesim.launch ,并运行:
<launch>
<group ns="sim1">
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
</group>
<group >
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="teleop" type="turtle_teleop_key" output="screen">
<remap from="/turtle1/cmd_vel" to="/sim1/turtle1/cmd_vel"/>
</node>
</launch>
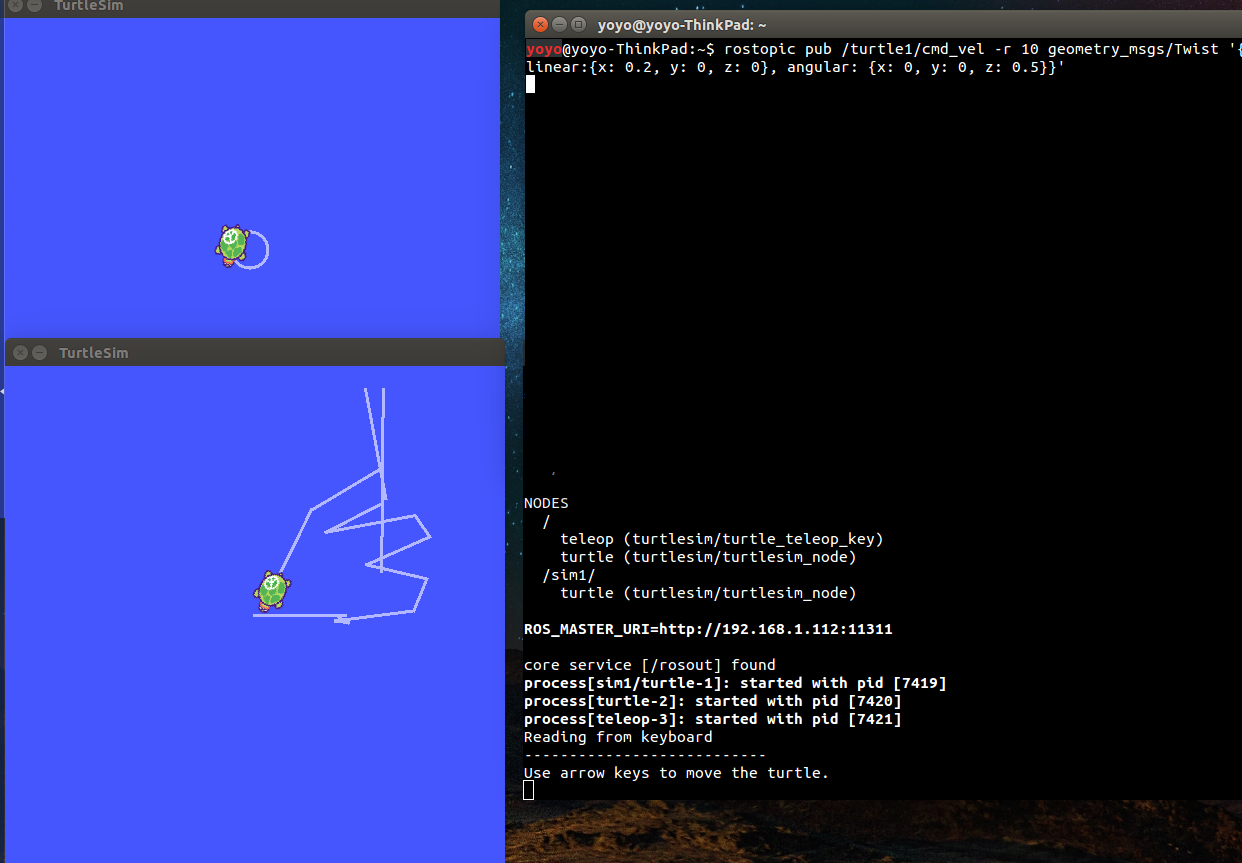
这里,我们将 topic /turtle1/cmd_vel 改成 /sim1/turtle1/cmd_vel,
再运行:
rostopic pub /turtle1/cmd_vel -r 10 geometry_msgs/Twist '{linear:{x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
现在我们可以发现,其中一只turtle在转圈,而另外一只受键盘控制。
不同电脑在同一roscore下运行多机器人节点
上面我们已经能在同一电脑中实现多机器人的控制了,接下来,我们将实现在不同电脑中实现多机器人的控制。
首先,准备两台电脑并确保在同一wifi下,然后运行 ifconfig
假设得到的结果为: 192.168.1.151 (machine A) 192.168.1.154 (machine B)
然后,在machine B 上运行:
ping 192.168.1.151
如果有返回,则可以实现两台电脑的通信。
现在,我们以machine A为主机建立多机器人系统。
然后再在machine A的 .bashrc 中添加:
function get_ip_address { ifconfig | fgrep -v 127.0.0.1 | fgrep '掩码:255.255.255.0' | egrep -o '地址:[^ ]*' | sed 's/^.*://'; }
export ROS_IP=$( get_ip_address )
在machine B的 .bashrc中添加:
function get_ip_address { ifconfig | fgrep -v 127.0.0.1 | fgrep '掩码:255.255.255.0' | egrep -o '地址:[^ ]*' | sed 's/^.*://'; }
export ROS_IP=$( get_ip_address )
export ROS_MASTER_URI=http://192.168.1.151:11311
现在,可以实现多电脑的机器人通信了:
在 machine A中运行:roscore
在 machine A中运行:turtlesim 节点
在 machine B中运行:turtlesim2节点
在 machine B中运行:teleop_key 节点
完成上述步骤后,你就会发现,我们可以同时控制A与B两个turtlesim 节点了。
下一篇介绍:
在下一篇中,我们将实现在模拟环境下的多机器人协作,防止机器人之间的碰撞,机器人的同步,以及自定义消息的创建。