学习ORB_SLAM3时在IMU初始化时,有些疑问故以笔记的形式记录下来:
ORB_SLAM3 IMU初始化是基于论文《Inertial-Only Optimization for Visual-Inertial Initialization》分3步:第一步把冰箱门打开。。。。
1.Vision-only MAP estimation(纯视觉的最大后验估计)
2.Inertial-only MAP estimation(纯惯导的最大后验估计)
3.Visual-inertial MAP estimation(视觉&惯导的最大后验估计)
1.Vision-only MAP estimation(纯视觉的最大后验估计):
初始化纯单目SLAM,在初始的两帧使用FAST提取和ORB描述子做2D-2D匹配,然后使用本质矩阵和单应矩阵模型计算变换矩阵,然后使用评分高的模型进行初始化运动和三角化特征点,初始化成功后以比较高的频率(4 Hz to 10 Hz)插入关键帧,在关键帧之间需要进行IMU的预积分。要进行IMU的外参标定。
2.Inertial-only MAP estimation(纯惯导的最大后验估计):
仅使用IMU数据,通过轨迹被固定,也就是关键帧的位姿被固定,对IMU的参数进行优化。
关键帧状态,除了位置其他参数定义如下:

 放缩尺度
放缩尺度
 重力方向的旋转
重力方向的旋转
 6轴的零偏:三轴(X,Y,Z)加速度零偏,三轴角(Pitch,Yaw,Roll)速度零偏
6轴的零偏:三轴(X,Y,Z)加速度零偏,三轴角(Pitch,Yaw,Roll)速度零偏
 0~K帧关键帧除去尺度的3轴(X,Y,Z)速度
0~K帧关键帧除去尺度的3轴(X,Y,Z)速度

 第0到第k关键帧帧的IMU积分
第0到第k关键帧帧的IMU积分
 从第0到第k帧的IMU测量值固定,第k关键帧数据分布概率
从第0到第k帧的IMU测量值固定,第k关键帧数据分布概率
 第k关键帧数据固定, 从第0到第k帧的可能的IMU测量值分布概率
第k关键帧数据固定, 从第0到第k帧的可能的IMU测量值分布概率
 第k关键帧数据分布概率
第k关键帧数据分布概率
最大后验估计:
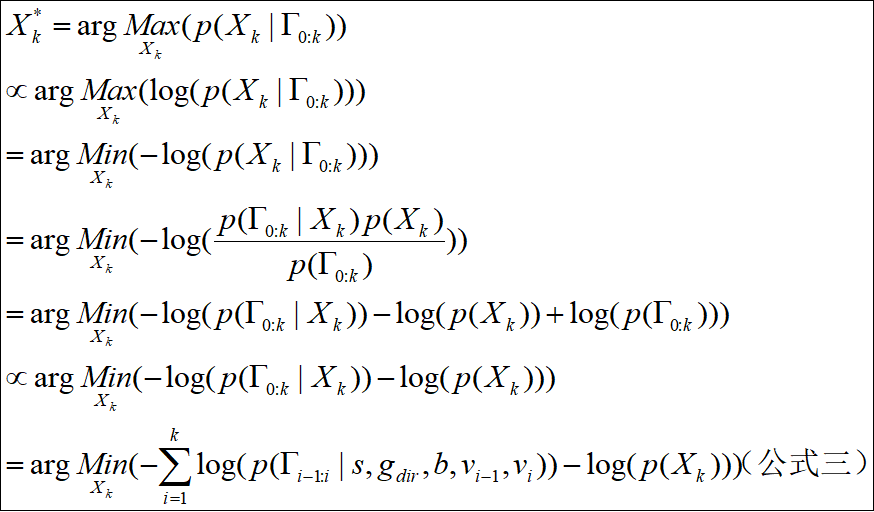
第二行,log函数单调性
第三行,最大值=取反最小值
第四行,根据贝叶斯公式:

第五行,log展开
第六行,删除无关项
第七行,似然展开

如果IMU预积分和先验的满足高斯误差分布,最大后验问题等效于:

 先验残差
先验残差
 帧间残差
帧间残差
对应代码部分:
Optimizer::InertialOptimization
图优化对应3种类型的边:
EdgePriorAcc =>先验加速度零偏残差
EdgePriorGyro=>先验角速度零偏残差
EdgeInertialGS=>帧间残差
TODO: