1 概念
2 线性时变系统的跟踪问题

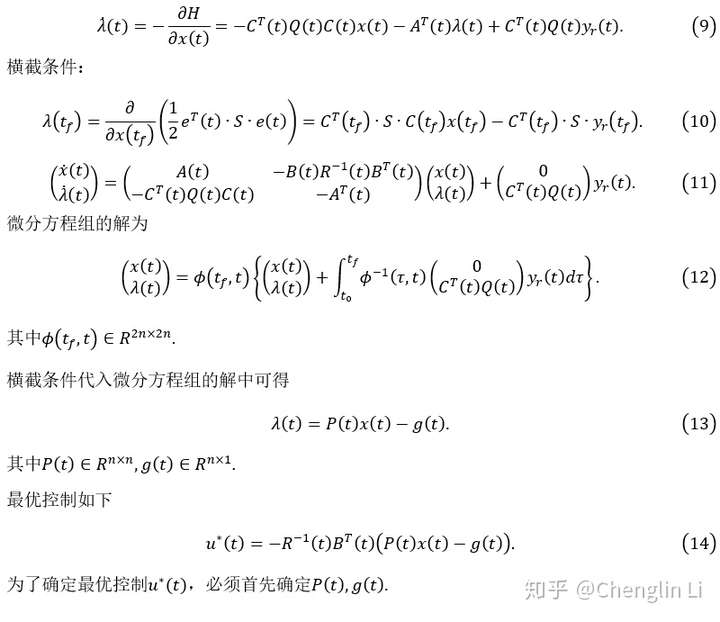
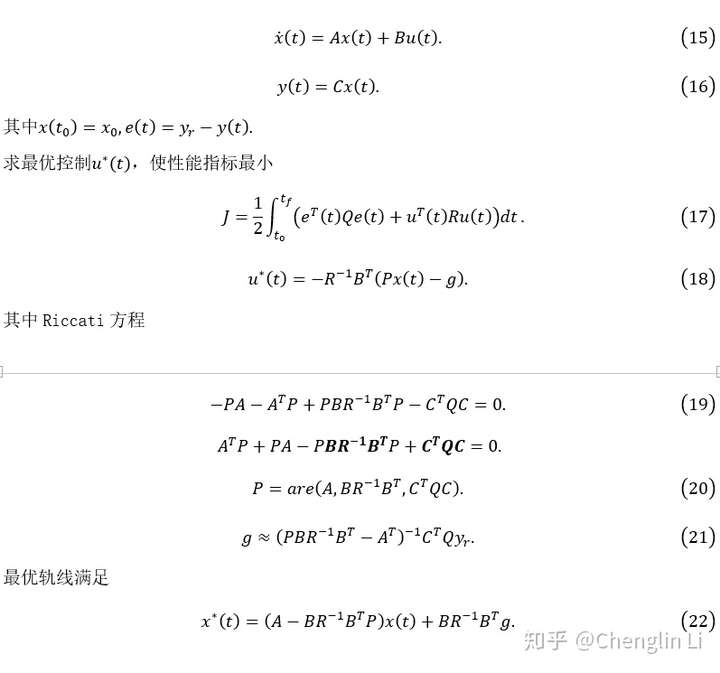
3 线性定常系统的跟踪问题
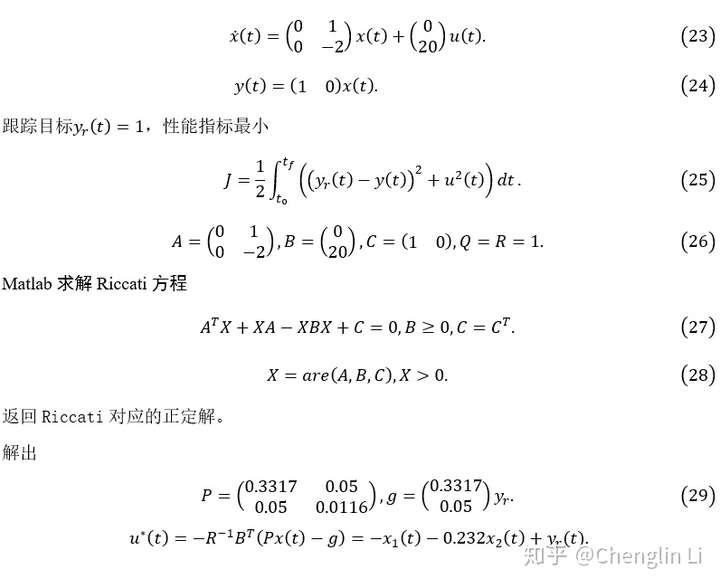
4 实例分析
5 仿真实验
先将上面的状态方程简化

建立模型



6 计算程序
1 clear
2 clc
3 A=[0,1; 0,-2];
4 B=[0;20];
5 C=[1,0] ;
6 Q=1;
7 R=1;
8 yr=1;
9
10 syms x1 x2
11 P=are( A, B*inv(R)*B', C'*Q*C )
12
13 g=inv(P*B*inv(R)*B'-A')*C'*Q*yr
14
15 u=-inv(R)*B'*(P*[x1; x2]-g)
Matlab矩阵运算函数-are函数
1、area函数:Riccati方程求解
2、用法说明
Riccati方程的一般格式是:A'x+xA-xBx+C=0
x=are(A,B,C) A、B、C为上述描述的Riccati方程的系数矩阵,x是方程的解
3、用法实例
1 >> A = [2 4 3;5 7 3;8 9 2]
2
3 B = [3 6 4;7 3 9;4 8 2]
4
5 C = [3 5 1;6 7 2;8 9 3]
6 x = are(A,B,C)
运行结果
A =
2 4 3
5 7 3
8 9 2
B =
3 6 4
7 3 9
4 8 2
C =
3 5 1
6 7 2
8 9 3
x =
0.5085 1.1173 0.3129
1.1480 1.0844 0.6190
0.6894 0.8121 0.2959