参考论文:ImageNet Classification with Deep Convolutional Neural Networks
1.特点
1.1 ReLU Nonlinearity的提出
- ReLU是非饱和非线性函数,f(x) = max(0, x),收敛速度比饱和激活函数快。
优缺点:
- ReLU部分解决了sigmoid的饱和性,缺点是在小于0的地方会出现神经单元死亡,并且不能复活的情况。所以,有关于ReLU的改进方法的提出(leaky ReLU, parameterized ReLU, random ReLU)
- 计算简单。
- 收敛速度快。
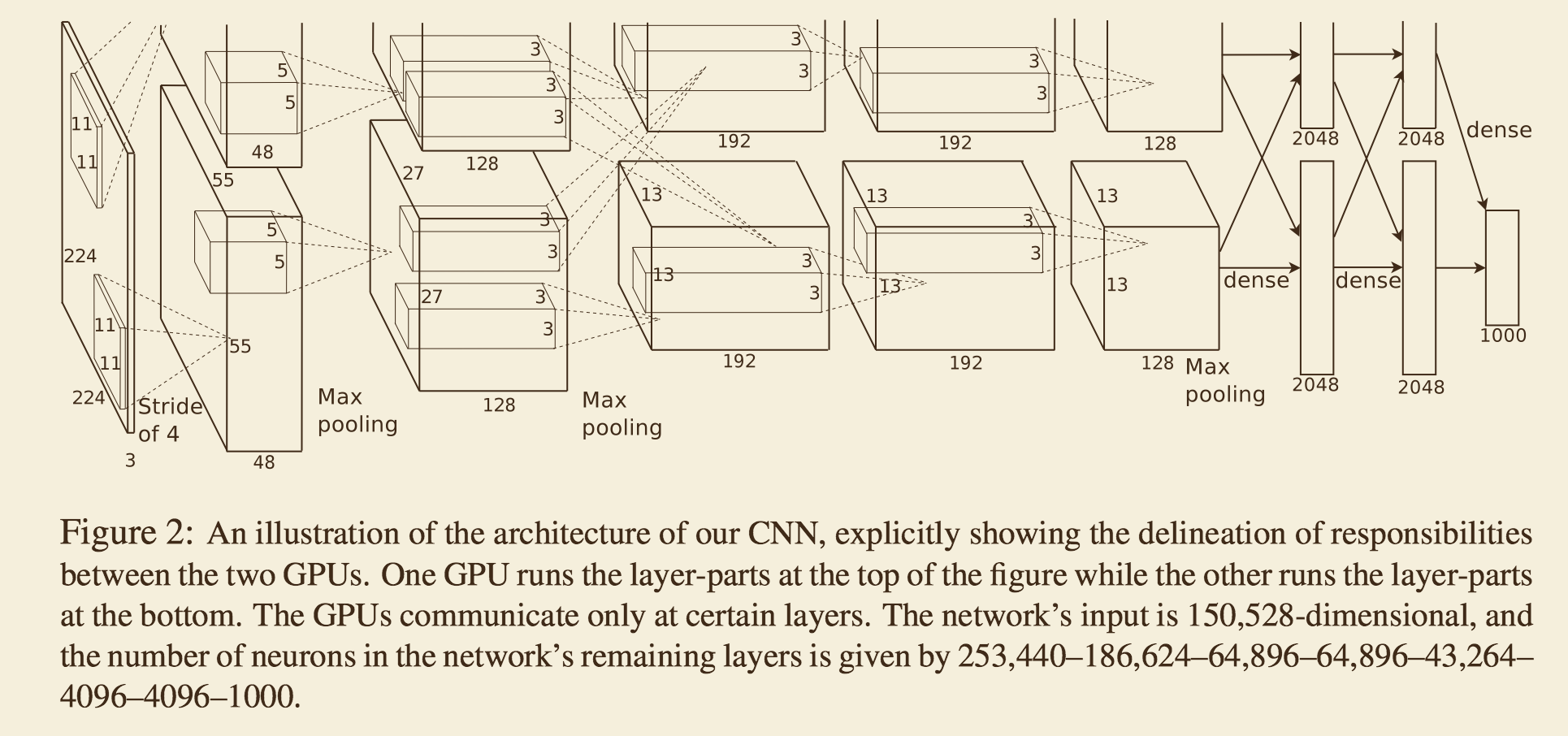
1.2 多GPU训练
-
并行化的方法是将kernel matrix划分为两部分各自放在不同的GPU上。
-
GPU之间的通信只发生在部分层。
-
5个卷积层,3个全连接层。
1.3 Local Response Normalization
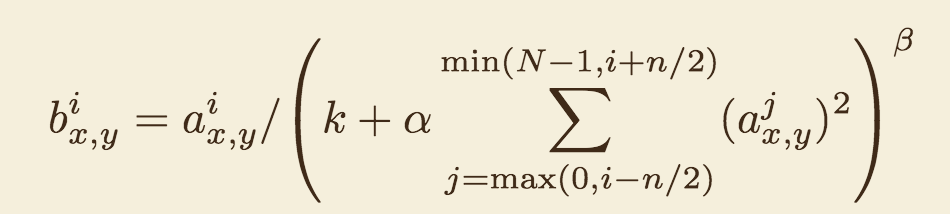
- ai是原激活值,bi是抑制后的激活值。
-
侧面抑制。也就是当前单元激活值,除以两边单元激活值。也就是说,如果一个单元激活值两边的值比它大一些的话,它自己将受到抑制,值会变小。
-
这也是一种正则化的方法。(brightness normalization)
1.4 Overlapping Pooling
- stride < kernei_size 那么就会出现重叠池化现象,有利于防止过拟合。
2.防止过拟合的方法
2.1 Data Augmentation
- 截取图的不同位置图,以及镜像变换。
- 利用PCA,add multiples of the found principal components.
2.2 Dropout
- 训练的时候让这一层部分神经单元输出为0,且不参与反向传播。
- 测试的时候让这一层利用上所有的神经单元,但是他们的输出值乘上0.5。
- 解释是,输出乘0.5用来近似指数级dropout网络的几何均值。