2017-2018-1 20155201 《信息安全系统设计基础》第九周学习总结
教材学习内容总结
一、存储技术
DRAM和SRAM的特性:

-
静态RAM(SRAM)
SRAM将每个位存储在一个双稳态的存储器单元里, -
动态RAM(DRAM)
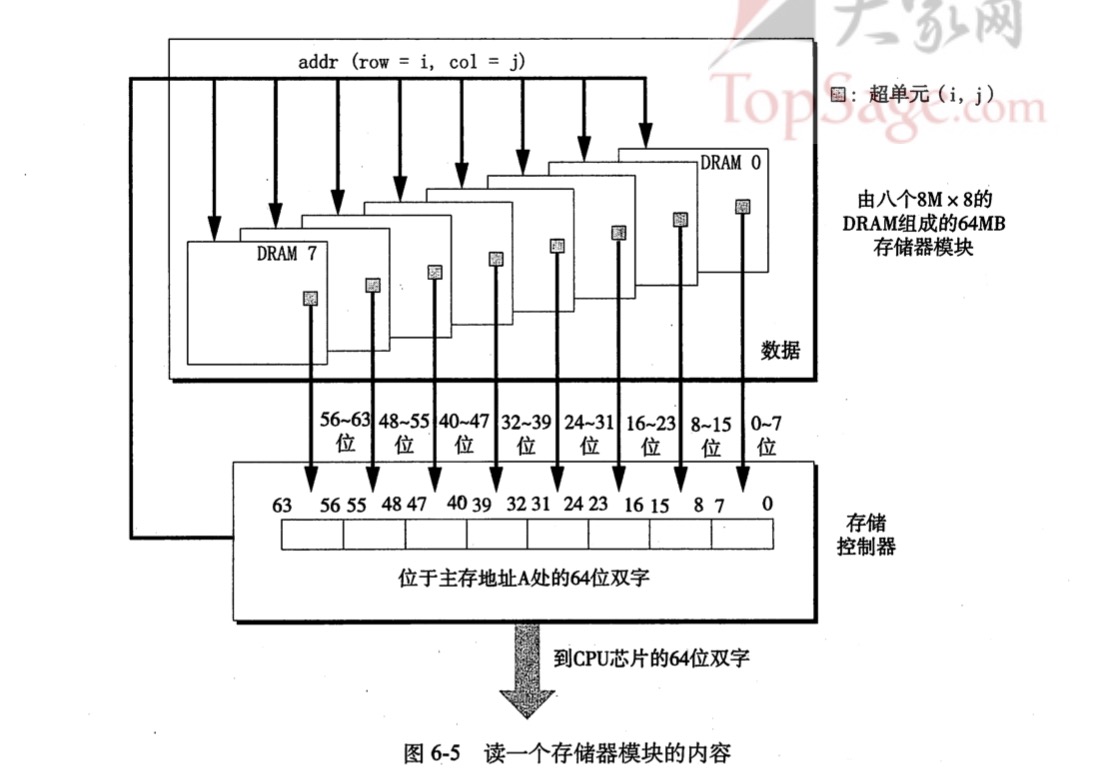
DRAM将每个位存储为一个电容的充电。每个DRAM芯片被连接到某个成为存储控制器的电路,电路可以一次传送w位到每个DRAM芯片或一次从每个DRAM芯片传出w位。
-
存储器模块
-
磁盘存储
磁盘是由一个或多个叠放在一起的盘片组成的,被封装在一个密封的包装里,整个装置通常称为磁盘驱动器,简称磁盘。 -
磁盘容量的计算:
磁盘容量=(字节数/扇区) * (平均盘区数/磁道) * (磁道数/表面) * (表面数/盘片) * (盘片数/磁盘) 假设一个磁盘,5个盘片,每个扇区512字节,每个面20000条磁道,每条磁道平均300个扇区。(注:每个盘片两个表面) 磁盘容量=(512) * (300) * (20000) * (2) * (5)=30 720 000 000字节=30.72GB -
磁盘对扇区的访问时间计算:
磁盘对扇区的访问时间有三个部分:寻道时间、旋转时间、传送时间。寻道时间:为了读取某个扇区的内容,传动臂先将读/写头定位到包含目标扇区的磁道上,移动传动臂所需的时间即为寻道时间。 T(avg seek)通常为3~9ms。 旋转时间:一旦读/写头定位到了期望的磁道,驱动器等待目标扇区的第一个位旋转到读/写头下。 T(max rotation)=(1s/RPM) * (60secs/1 min) T(avg rotation)=1/2 * T(max rotation) 传送时间:一个扇区的传送时间依赖于旋转速度和每条磁道的扇区数目。 T(avg transfer)= (1s/RPM) * (1/(平均扇区数/磁道)) * (60secs1min) 例题————一个有如下参数的磁盘:旋转速率:7200 RPM,T(avg seek)=9ms,每条磁道的平均扇区数:400 平均旋转延迟:T(avg rotation)=1/2 * T(max rotation) =1/2 * (60sec/7200 RPM) * (1000ms/sec) =4 ms 平均传送时间:T(avg transfer)=(60/7200 RPM) * (1/400) * (1000ms/sec)=0.02 ms
二、局部性
- 局部性的两种形式:时间局部性和空间局部性;良好的时间局部性程序中,被引用过一次的存储器位置很可能在不远的将来再被多次引用。重复引用同一个变量的程序具有良好的时间局部性。良好的空间局部性程序中,一个存储器位置被引用了一次,程序很可能在不远的将来引用附近的一个存储器位置。
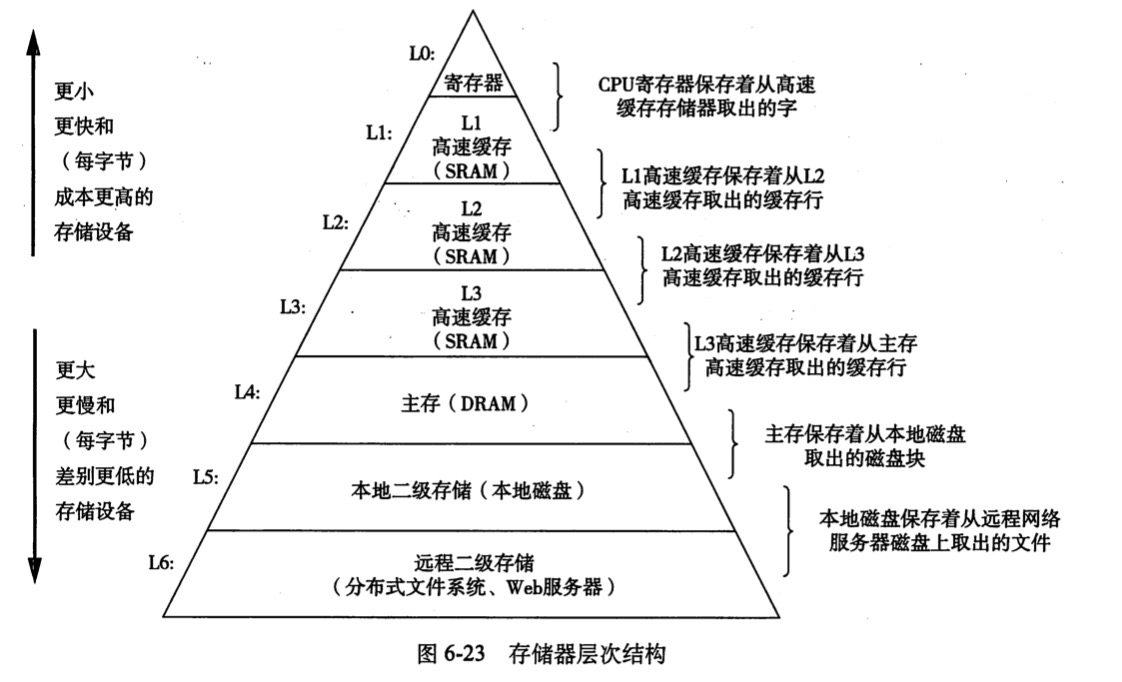
三、存储器层次结构
-
-
中心思想是:对于每个k,位于k层的更快更小的存储设备作为位于k+1层的更大更慢的存储设备的缓存。层次结构中的每一层都缓存来自较第一层的数据对象。
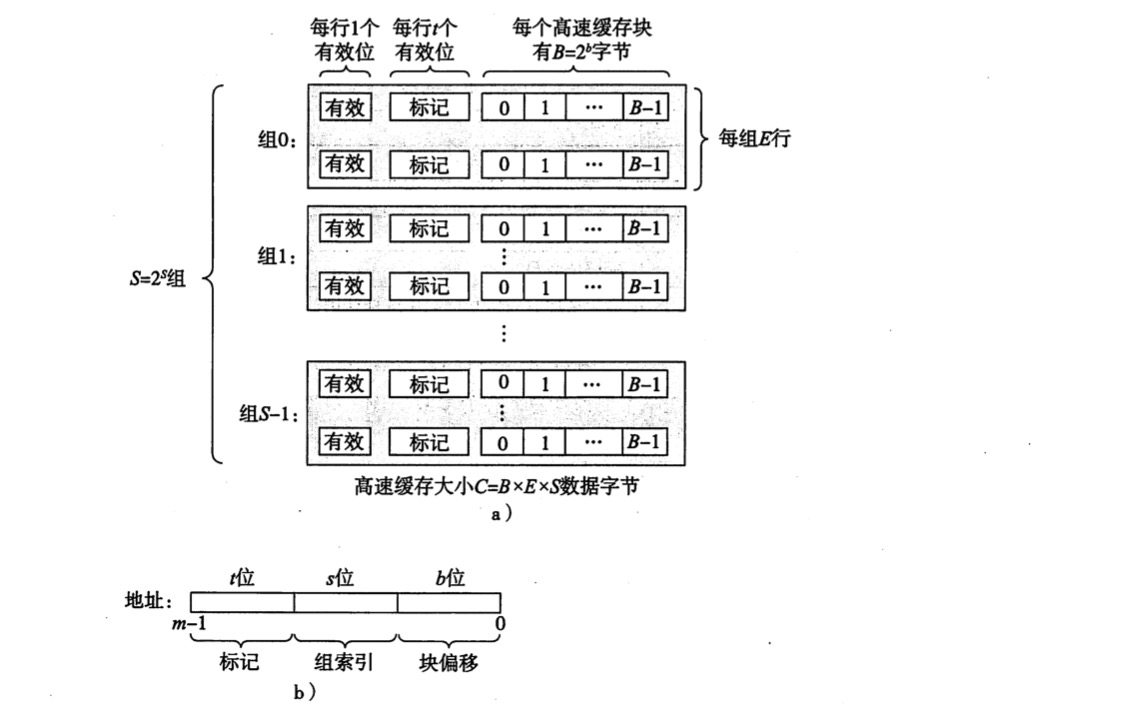
四、高速缓存
-
-
高速缓存参数:
-
高速缓存有四个组,每个组一行,每个块2字节,列举出整个地址空间并划分好位

- cpu如何执行读:
- 先读地址0的字
- 读地址1的字
- 读地址13的字
- 读地址8的字
- 读地址0的字

教材学习中的问题和解决过程
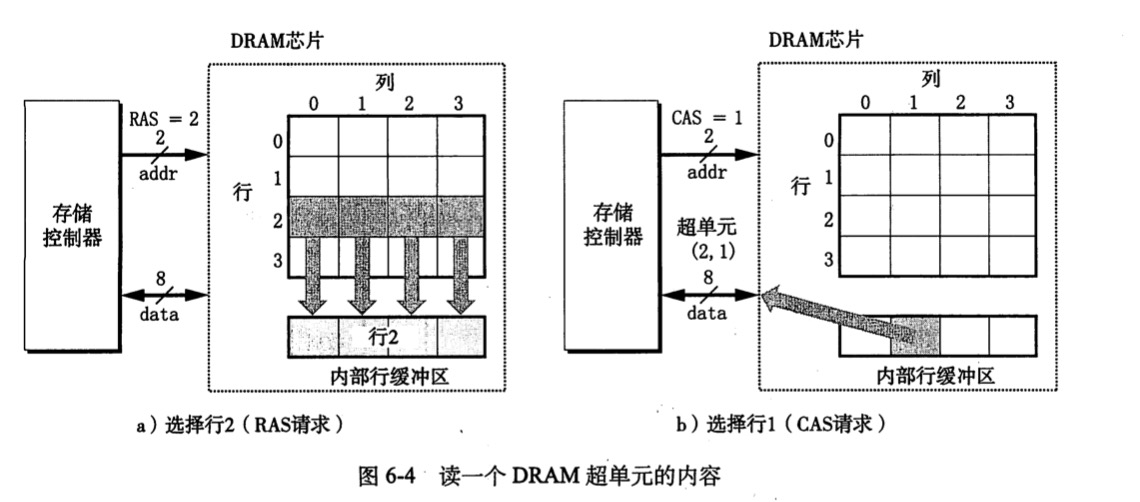
- 问题1:如何理解DRAM芯片的组织?
- 问题1解决方案:下图展示的是16 * 8的DRAM芯片的组织,d=16(超单元),每个超单元有w=8位,r=4行,c=4列。信息通过引脚流入和流出芯片。每个引脚携带一个1位的信号。
要从DRAM中读出超单元(2,1),存储控制器发送行地址2,DRAM将行2的整个内容都拷贝到一个内部行缓冲区;接下来,存储控制器发送列地址1,最后从行缓冲区拷贝出超单元(2,1)中的8位,发送到存储控制器。
示意图:

代码调试中的问题和解决过程
- 问题1:如何做到以步长为1的引用模式扫描三维数组a?
- 问题1解决方法:教材练习题6.8
int sumarray3d(int a[N][N][N]){
int i,j,k,sum=0;
for(i=0;i<N;i++)
for(j=0;j<N;j++)
for(k=0;k<N;k++)
sum+=a[i][j][k];
return sum;
}
代码托管

结对及互评
本周结对学习情况
-
结对学习内容
学习进度条
| 代码行数(新增/累积) | 博客量(新增/累积) | 学习时间(新增/累积) | 重要成长 | |
|---|---|---|---|---|
| 目标 | 5000行 | 30篇 | 400小时 | |
| 第一周 | 195/195 | 1/1 | 10/10 | |
| 第三周 | 314/706 | 1/2 | 15/25 | |
| 第五周 | 254/960 | 1/3 | 10/35 | |
| 第七周 | 24/1759 | 1/4 | 15/50 | |
| 第九周 | 1207/2966 | 2/6 | 15/65 |
-
计划学习时间:12小时
-
实际学习时间:15小时