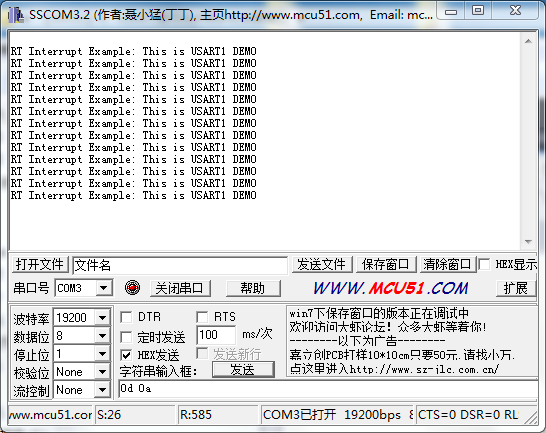
>_<!功能:PC端发送一个特定的字符:0x0d 0x0a,单片机则返回一句话,如图:
>_<!知识:
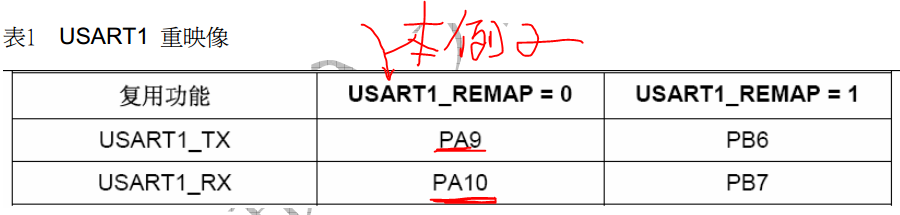
1、复用功能I/O和调试配置(AFIO)
为了优化外设数目,可以把一些复用功能重新映射到其他引脚上。设置复用重映射和调试I/O配置寄存器(AFIO_MAPR)(参见0节)实现引脚的重新映射。这时,复用功能不再映射到它们的原始分配上。
2、嵌套向量中断控制器(NVIC)
- l 43 个可屏蔽中断通道(不包含16 个Cortex-M3 的中断线);
- l 16 个可编程的优先等级;
- l 低延迟的异常和中断处理;
- l 电源管理控制;
- l 系统控制寄存器的实现;
- l 嵌套向量中断控制器(NVIC)和处理器核的接口紧密相连,可以实现低延迟的中断处理和有效处理地处理晚到的中断。
PS:
a、SysTick:系统嘀嗒校准值固定到9000,当系统嘀嗒时钟设定为9兆赫,产生1ms时基。
b、中断和异常向量 :【中断向量表】
3、USART通用同步异步收发器(USART)
- 它支持同步单向通信和半双工单线通信
- 任何USART双向通信至少需要两个脚:接收数据输入(RX)和发送数据输出(TX)。
a、RX:接收数据串行输。通过过采样技术来区别数据和噪音,从而恢复数据。
b、TX:发送数据输出。当发送器被禁止时,输出引脚恢复到它的I/O 端口配置。当发送器被激活,并且没东西发送时,TX 引脚处于高电平。
>_<!程序:

a、USART设置,这个要看固件库!首先用结构体把参数配置好,然后调用初始化函数;接着使能接收中断和发送缓冲中断;最后使能USART1。
1 void USART_Config(USART_TypeDef* USARTx){ 2 USART_InitStructure.USART_BaudRate = 19200; //速率19200bps 3 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位 4 USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位 5 USART_InitStructure.USART_Parity = USART_Parity_No; //无校验位 6 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控 7 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 8 /* Configure USART1 */ 9 USART_Init(USARTx, &USART_InitStructure); //配置串口参数函数 10 /* Enable USART1 Receive and Transmit interrupts */ 11 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断 12 USART_ITConfig(USART1, USART_IT_TXE, ENABLE); //使能发送缓冲空中断 13 /* Enable the USART1 */ 14 USART_Cmd(USART1, ENABLE); 15 }
b、配置系统时钟72MHz+外设时钟使能。注意这里有复用,所以要使能复用时钟。
1 void RCC_Configuration(void){ 2 SystemInit(); 3 RCC_APB2PeriphClockCmd( RCC_APB2Periph_USART1 |RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_AFIO , ENABLE); 4 }
c、 LED的GPIO口配置和复用的A9,A10用于数据收发
1 void GPIO_Configuration(void){ 2 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1控制--PB5 3 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 4 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 5 GPIO_Init(GPIOB, &GPIO_InitStructure); 6 7 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //USART1 TX 8 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 9 GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口 10 11 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART1 RX 12 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //复用开漏输入 13 GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口 14 }
d、中断向量初始化,看固件库!
1 void NVIC_Configuration(void){ 2 /* 结构声明*/ 3 NVIC_InitTypeDef NVIC_InitStructure; 4 5 /* Configure the NVIC Preemption Priority Bits */ 6 /* Configure one bit for preemption priority */ 7 /* 优先级组 说明了抢占优先级所用的位数,和子优先级所用的位数 在这里是1, 7 */ 8 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); 9 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //设置串口1中断 10 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级 0 11 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级为0 12 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能 13 NVIC_Init(&NVIC_InitStructure); 14 }
e、Main函数:rec_f为有效帧标志位
1 int main(void){ 2 uint8_t a=0;//LED高低电压控制 3 RCC_Configuration(); //系统时钟设置 4 NVIC_Configuration(); //中断源配置 5 GPIO_Configuration(); //端口初始化 6 USART_Config(USART1); //串口1初始化 7 8 while (1){ 9 if(rec_f==1){ //判断是否收到一帧有效数据 10 rec_f=0; 11 for(i=0;i<sizeof(TxBuffer1);i++)//发送字符串 12 { 13 USART_SendChar(USART1,TxBuffer1[i]); 14 Delay(0x0000ff00); 15 } 16 if(a==0){GPIO_SetBits(GPIOB, GPIO_Pin_5);a=1;} //LED1 明暗闪烁 17 else{GPIO_ResetBits(GPIOB, GPIO_Pin_5);a=0;} 18 } 19 } 20 }
这里发送函数封装为:
1 void USART_SendChar(USART_TypeDef* USARTx,uint8_t data){ 2 USART_SendData(USARTx,data); 3 while(USART_GetFlagStatus(USARTx,USART_FLAG_TC)==RESET); 4 }
接收函数在中断函数中,当上位机发送数据给单片机时,单片机将进入该中断服务程序,进行数据接收,这里上位机发送的数据必须以0x0d和0x0a结尾,如果不是以这两个结尾说明不是有效帧,则不处理:
1 void USART1_IRQHandler(void) //串口1 中断服务程序 2 { 3 unsigned int i; 4 if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断读寄存器是否非空 5 { 6 RxBuffer1[RxCounter1++] = USART_ReceiveData(USART1); //将读寄存器的数据缓存到接收缓冲区里 7 if(RxBuffer1[RxCounter1-2]==0x0d&&RxBuffer1[RxCounter1-1]==0x0a)//判断结束标志是否是0x0d 0x0a 8 { 9 for(i=0; i< RxCounter1; i++) TxBuffer1[i] = RxBuffer1[i]; //将接收缓冲器的数据转到发送缓冲区,准备转发 10 rec_f=1; //接收成功标志 11 TxBuffer1[RxCounter1]=0; //发送缓冲区结束符 12 TxCounter1=RxCounter1; 13 RxCounter1=0; 14 } 15 } 16 if(USART_GetITStatus(USART1, USART_IT_TXE) != RESET) //这段是为了避免STM32 USART 第一个字节发不出去的BUG 17 { 18 USART_ITConfig(USART1, USART_IT_TXE, DISABLE); //禁止发缓冲器空中断, 19 } 20 }