前言:上一节讲UART基本知识介绍完了,并深入剖析了一个串口发送工程,本节将进一步介绍串口收发!
1、初始化
在串口初始化部分,和上一节不同的地方是:
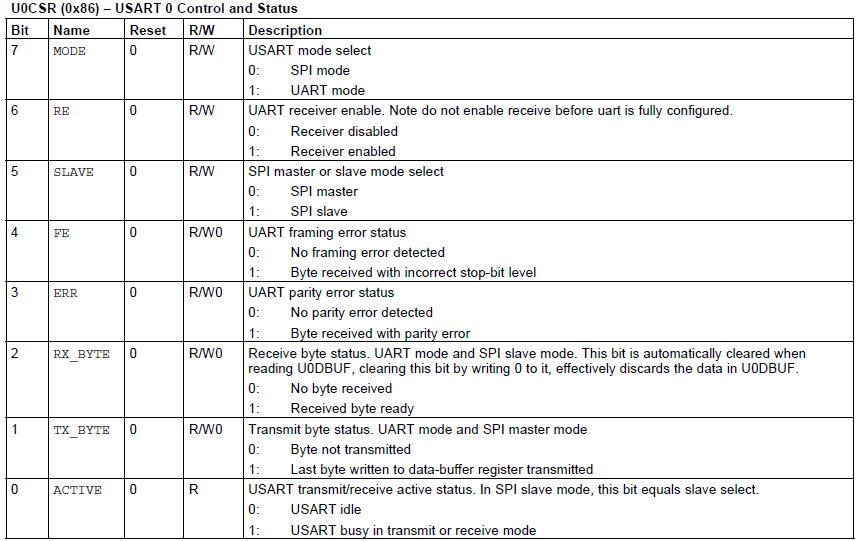
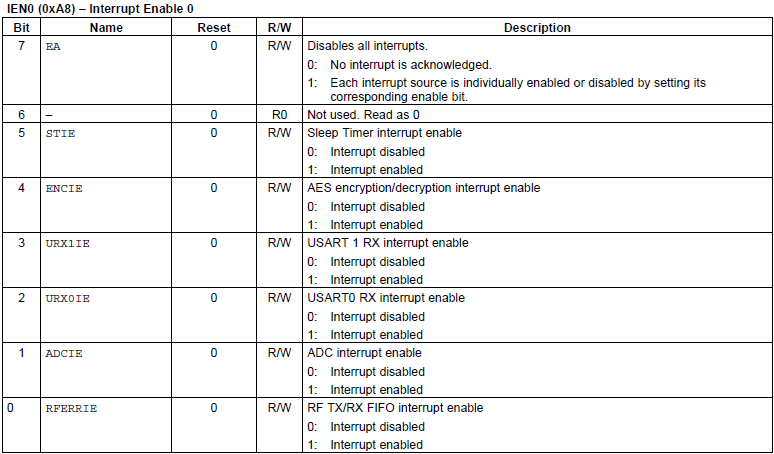
51 U0CSR |= 0x40; //允许接收 52 IEN0 |= 0x84; //开总中断允许接收中断
第51行使能接收数据,上一节介绍的仅仅是发送,所以没有这一句配置:
第51行开总中断和UART0中断:
1 /**************************************************************************** 2 * 文 件 名: main.c 3 * 描 述: 设置串口调试助手波特率:115200bps 8N1 4 * 串口调试助手给CC2530发字符串时,开发板会返回接收到的字符串 5 ****************************************************************************/ 6 #include <ioCC2530.h> 7 #include <string.h> 8 9 typedef unsigned char uchar; 10 typedef unsigned int uint; 11 12 #define UART0_RX 1 13 #define UART0_TX 2 14 #define SIZE 51 15 16 char RxBuf; 17 char UartState; 18 uchar count; 19 char RxData[SIZE]; //存储发送字符串 20 21 /**************************************************************************** 22 * 名 称: DelayMS() 23 * 功 能: 以毫秒为单位延时 24 * 入口参数: msec 延时参数,值越大,延时越久 25 * 出口参数: 无 26 ****************************************************************************/ 27 void DelayMS(uint msec) 28 { 29 uint i,j; 30 31 for (i=0; i<msec; i++) 32 for (j=0; j<1070; j++); 33 } 34 35 /**************************************************************************** 36 * 名 称: InitUart() 37 * 功 能: 串口初始化函数 38 * 入口参数: 无 39 * 出口参数: 无 40 ****************************************************************************/ 41 void InitUart(void) 42 { 43 PERCFG = 0x00; //外设控制寄存器 USART 0的IO位置:0为P0口位置1 44 P0SEL = 0x0c; //P0_2,P0_3用作串口(外设功能) 45 P2DIR &= ~0xC0; //P0优先作为UART0 46 47 U0CSR |= 0x80; //设置为UART方式 48 U0GCR |= 11; 49 U0BAUD |= 216; //波特率设为115200 50 UTX0IF = 0; //UART0 TX中断标志初始置位0 51 U0CSR |= 0x40; //允许接收 52 IEN0 |= 0x84; //开总中断允许接收中断 53 } 54 55 /**************************************************************************** 56 * 名 称: UartSendString() 57 * 功 能: 串口发送函数 58 * 入口参数: Data:发送缓冲区 len:发送长度 59 * 出口参数: 无 60 ****************************************************************************/ 61 void UartSendString(char *Data, int len) 62 { 63 uint i; 64 65 for(i=0; i<len; i++) 66 { 67 U0DBUF = *Data++; 68 while(UTX0IF == 0); 69 UTX0IF = 0; 70 } 71 } 72 73 /**************************************************************************** 74 * 名 称: UART0_ISR(void) 串口中断处理函数 75 * 描 述: 当串口0产生接收中断,将收到的数据保存在RxBuf中 76 ****************************************************************************/ 77 #pragma vector = URX0_VECTOR 78 __interrupt void UART0_ISR(void) 79 { 80 URX0IF = 0; // 清中断标志 81 RxBuf = U0DBUF; 82 } 83 84 85 /**************************************************************************** 86 * 程序入口函数 87 ****************************************************************************/ 88 void main(void) 89 { 90 CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振 91 while(CLKCONSTA & 0x40); //等待晶振稳定为32M 92 CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ 93 94 InitUart(); //调用串口初始化函数 95 UartState = UART0_RX; //串口0默认处于接收模式 96 memset(RxData, 0, SIZE); 97 98 while(1) 99 { 100 if(UartState == UART0_RX) //接收状态 101 { 102 if(RxBuf != 0) 103 { 104 if((RxBuf != '#')&&(count < 50))//以'#'为结束符,一次最多接收50个字符 105 RxData[count++] = RxBuf; 106 else 107 { 108 if(count >= 50) //判断数据合法性,防止溢出 109 { 110 count = 0; //计数清0 111 memset(RxData, 0, SIZE);//清空接收缓冲区 112 } 113 else 114 UartState = UART0_TX; //进入发送状态 115 } 116 RxBuf = 0; 117 } 118 } 119 120 if(UartState == UART0_TX) //发送状态 121 { 122 U0CSR &= ~0x40; //禁止接收 123 UartSendString(RxData, count); //发送已记录的字符串。 124 U0CSR |= 0x40; //允许接收 125 UartState = UART0_RX; //恢复到接收状态 126 count = 0; //计数清0 127 memset(RxData, 0, SIZE); //清空接收缓冲区 128 } 129 } 130 }
2、中断回调函数
第77~82行是UART0中断处理函数,每次有数据从上位机发送下来都会触发该函数执行,在概述内将上位机发送来的数据保存在RxBuf中:
77 #pragma vector = URX0_VECTOR
78 __interrupt void UART0_ISR(void)
79 {
80 URX0IF = 0; // 清中断标志
81 RxBuf = U0DBUF;
82 }
3、main函数流程
串口初始状态为接收状态,其中100-118行把中断处理函数中暂存的接收数据RxBuf转存到RxData数组中,接收过程中发现结束标志位则将状态转换为发送状态,则120~128行发送数据的代码段将被执行:
120 if(UartState == UART0_TX) //发送状态
121 {
122 U0CSR &= ~0x40; //禁止接收
123 UartSendString(RxData, count); //发送已记录的字符串。
124 U0CSR |= 0x40; //允许接收
125 UartState = UART0_RX; //恢复到接收状态
126 count = 0; //计数清0
127 memset(RxData, 0, SIZE); //清空接收缓冲区
128 }
这里要特别注意,发送的时候要禁止接收,发送完毕要使能接收,着也就是122行和124行代码的意图!
Zigbee系列文章:
[ZigBee] 3、ZigBee基础实验——GPIO输出控制实验-控制Led亮灭
[ZigBee] 5、ZigBee基础实验——图文与代码详解定时器1(16位定时器)(长文)
[ZigBee] 6、ZigBee基础实验——定时器3和定时器4(8 位定时器)
[ZigBee] 7、ZigBee之UART剖析(ONLY串口发送)
PS:如果您觉得还不错,点个赞,让更多人受益~
@beautifulzzzz 2016-07-16 continue~
e-mail:beautifulzzzz@qq.com
sina:http://weibo.com/beautifulzzzz?is_all=1