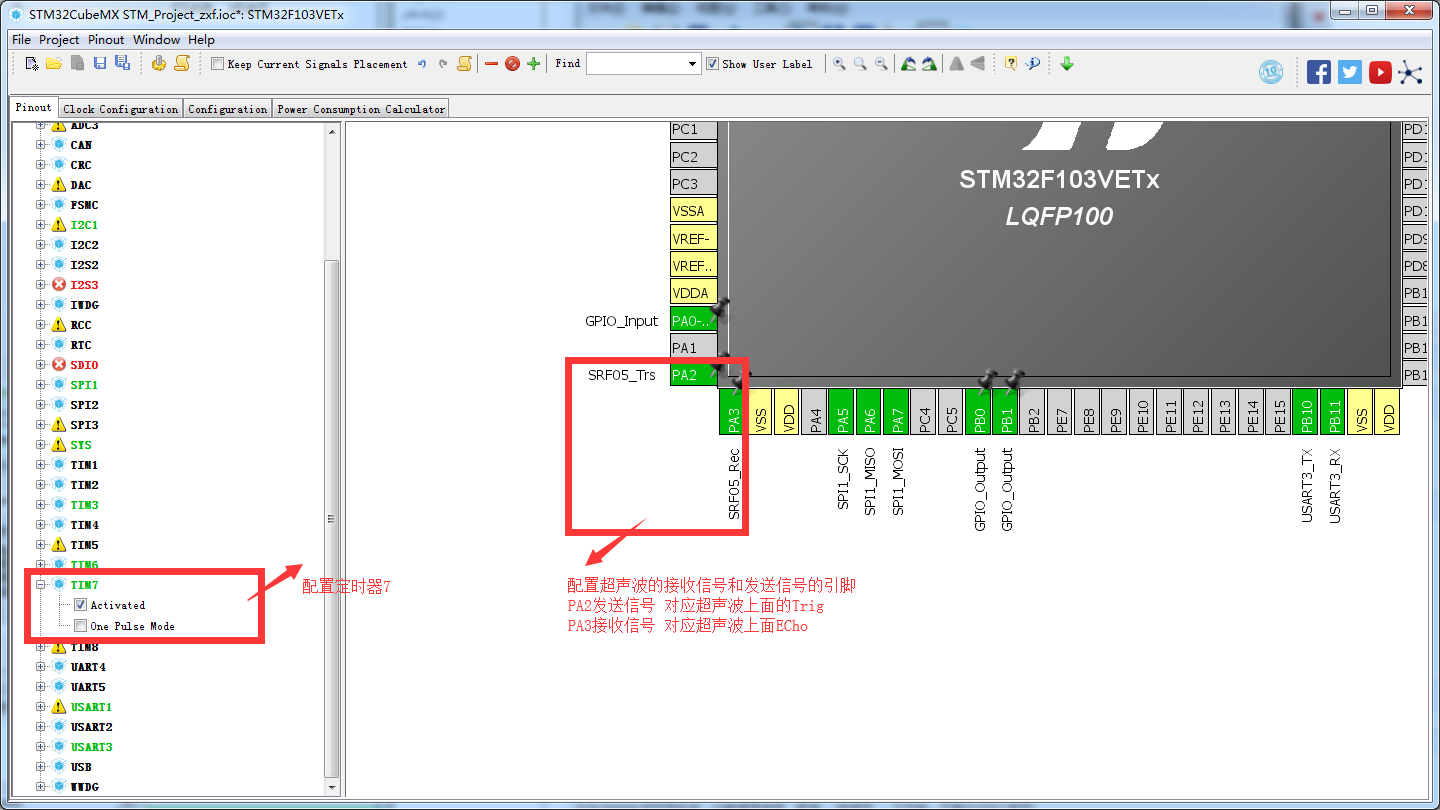
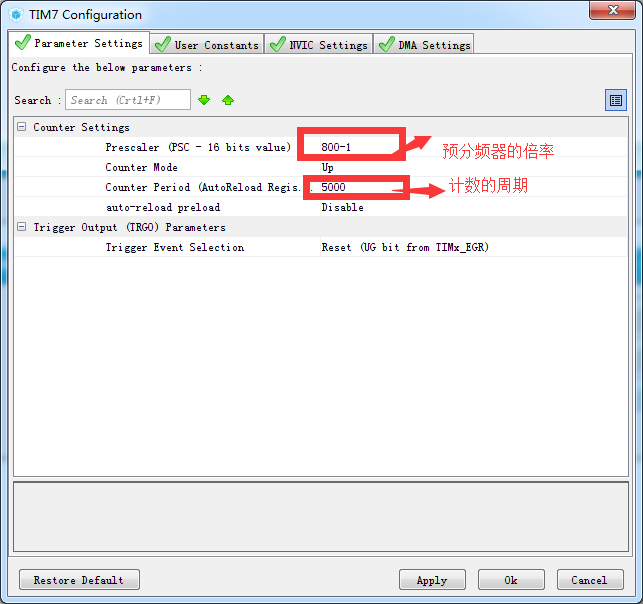
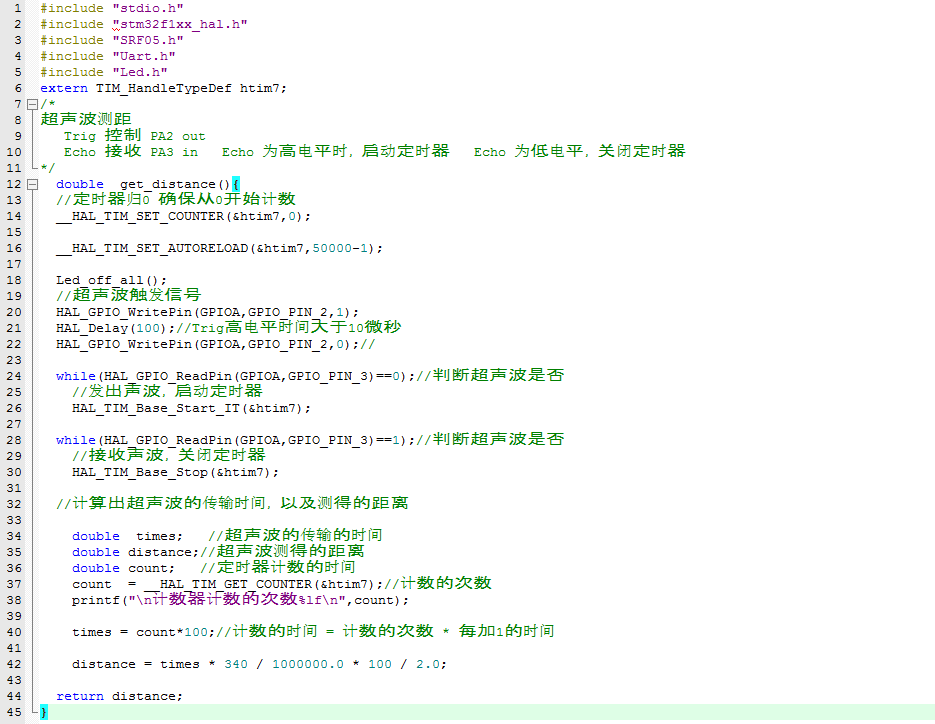
1 extern TIM_HandleTypeDef htim7; 2 /* 3 ³¬Éù²¨²â¾à 4 Trig ¿ØÖÆ PA2 out 5 Echo ½ÓÊÕ PA3 in Echo Ϊ¸ßµçƽʱ£¬Æô¶¯¶¨Ê±Æ÷ Echo ΪµÍµçƽ£¬¹Ø±Õ¶¨Ê±Æ÷ 6 */ 7 double get_distance(){ 8 //¶¨Ê±Æ÷¹é0 È·±£´Ó0¿ªÊ¼¼ÆÊý 9 __HAL_TIM_SET_COUNTER(&htim7,0); 10 11 __HAL_TIM_SET_AUTORELOAD(&htim7,50000-1); 12 13 Led_off_all(); 14 //³¬Éù²¨´¥·¢ÐźŠ15 HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,1); 16 HAL_Delay(100);//Trig¸ßµçƽʱ¼ä´óÓÚ10΢Ãë 17 HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,0);// 18 19 while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_3)==0);//Åжϳ¬Éù²¨ÊÇ·ñ 20 //·¢³öÉù²¨£¬Æô¶¯¶¨Ê±Æ÷ 21 HAL_TIM_Base_Start_IT(&htim7); 22 23 while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_3)==1);//Åжϳ¬Éù²¨ÊÇ·ñ 24 //½ÓÊÕÉù²¨£¬¹Ø±Õ¶¨Ê±Æ÷ 25 HAL_TIM_Base_Stop(&htim7); 26 27 //¼ÆËã³ö³¬Éù²¨µÄ´«Êäʱ¼ä£¬ÒÔ¼°²âµÃµÄ¾àÀë 28 29 double times; //³¬Éù²¨µÄ´«ÊäµÄʱ¼ä 30 double distance;//³¬Éù²¨²âµÃµÄ¾àÀë 31 double count; //¶¨Ê±Æ÷¼ÆÊýµÄʱ¼ä 32 count = __HAL_TIM_GET_COUNTER(&htim7);//¼ÆÊýµÄ´ÎÊý 33 printf(" 计数器计数的次数:%lf ",count); 34 35 times = count*100;//¼ÆÊýµÄʱ¼ä = ¼ÆÊýµÄ´ÎÊý * ÿ¼Ó1µÄʱ¼ä 36 37 distance = times * 340 / 1000000.0 * 100 / 2.0; 38 39 return distance; 40 }
void main(){
printf("距离:%.2lf",get_distance());
}
运行的结果