链接:https://zhuanlan.zhihu.com/p/78848809
一、简介
在实际的工程应用中,经常会遇到初始结果噪声太多的问题,比如信号强度抖动的太厉害,比如视频流中的bbox抖动的太厉害,比如光谱信号抖动的太厉害等等,这时候就需要一些简单的滑动平均算法。滑动平均其实是一个很朴素的方法,但是要与实际结合,构造出合适的平滑方式,是需要一些思考的。下面我将分别介绍滑动平均法(Moving Average)、指数滑动平均法(Exponential Mean Average)、SG滤波法(Savitzky Golay Filter)。
二、滑动平均法
简单来说,滑动平均法把前后时刻的一共2n+1个观测值做平均,得到当前时刻的滤波结果。这是一个比较符合直觉的平滑方法,在生活中、工作中很经常会用到,但是很少去思考这么做的依据是什么,下面我就来仔细分析一下其中的原理。
对于一个观测序列,我们有这样的假设:每一次的观测值是带有噪声的,而我们期望噪声的均值为0,方差为 ,观测值和真实值之间的关系如下:
(1)
其中, 为观测值,
为真实值,
为噪声。为了降低噪声的影响,我们把相邻时刻的观测值相加后平均,公式如下:
(2)
表示
时刻的滤波结果,
表示
时刻的观测值,
代表滑动窗口半径。将公式(1)代入公式(2),可以得到
(3)
前面说到了,我们假设噪声的均值为0,所以 为0,那么我们得到的结果就是:
(4)
当观测数据的真实值变化较小时,或者变化为线性时,可以近似认为:
(5)
从上面的分析过程我们可以看到,当滑动窗口内的真实数据变化不大的时候,我们可以抑制掉很大一部分噪声,滤波结果近似真实值;当滑动窗口内的真实值变化较大时,这种滤波方式就会损失一部分精确度,滤波结果接近真实值的平均期望。所以,窗口的大小会对滤波结果有很大影响。窗口越大,滤波结果越平滑,但会一定程度上偏离真实值;窗口越小,滤波结果越接近观测值,但噪声偏大。
滑动平均法还有一个升级版本,也就是加权滑动平均法。实际场景中,每个观测值的重要程度不同,忽略每个观测值的置信度直接平均不能得到精确的结果,所以就需要给观测值加权。加权滑动平均法的公式如下:
(6)
为
时刻的权重。(6)式表示的是把每个观测值乘以权重后再平均。这种方法适用于观测值本身带有置信度的情况。注意,这里有一个小问题,如果置信度的取值范围是0到1之间,那么加权之后计算得到的观测值往往小于真实值,我来解释一下为什么。首先,我们假设观测值和真实值的均值是相等的,也就是
(7)
当我们把观测值乘以权重了之后,观测值和真实值的均值就不相等了,因为真实值的权重均值为1,而观测值的权重均值为 ,是小于等于1的,最终的预测值也是小于等于真实值的,而且大概率是小于。所以我们需要对(6)式增加一个修正:
(8)
这样,得到的预测值就会更加合理了。
小结:滑动平均法使用的前提是,噪声的均值为0,真实值变化不大或线性变化的场景。如果真实值有较高频率的非线性突变的话,滑动平均法的效果就不够好了。同时,滑动平均法的窗口选取很重要,需要根据具体数据来选择。如果需要使用在线版本的滑动平均,那么就要把窗口前移,也就是把当前时刻的前n个观测值进行平均,但这样得到的结果会明显滞后于当前观测值,窗口越大,滞后的现象越严重。
class MovAvg(object):
def __init__(self, window_size=7):
self.window_size = window_size
self.data_queue = []
def update(self, data):
if len(self.data_queue) == self.window_size:
del self.data_queue[0]
self.data_queue.append(data)
return sum(self.data_queue)/len(self.data_queue)
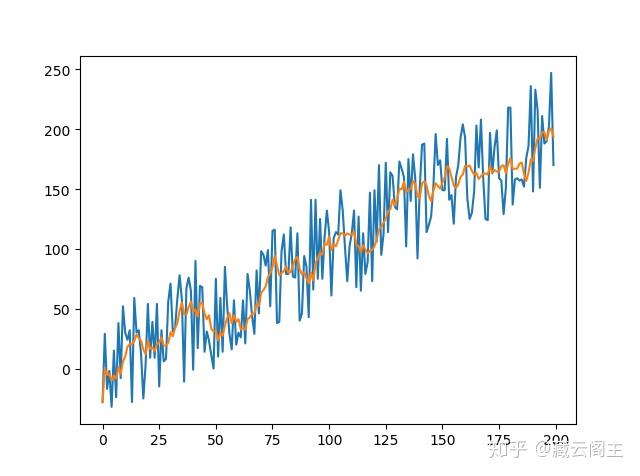 一维数据的滑动平均效果
一维数据的滑动平均效果
三、指数滑动平均法
指数滑动平均法相当于加权滑动平均法的变体,主要区别在于,指数滑动平均法的权重是固定的、随时间推移呈指数衰减。指数滑动平均法的公式如下:
(9)
表示预测值,
表示衰减权重,通常我们设为固定值0.9,
表示观测值,这是一个递推公式。前面说了,指数滑动平均法的权重是随时间推移呈指数衰减的,那么上面的这个递推公式的指数体现在哪里呢?我们把(9)式进行延伸:
(10)
将(9)和(10)两式子联立,可得
(11)
发现没有,在(11)式中 与
的关系是
倍,而在(9)式中
与
的关系是
倍,呈指数衰减关系。同时,在初始时刻有如下关系:
(12)
根据这一关系和上述的递推公式,我们就能够得到整个算法的公式了。
由于这种指数衰减的特性,指数滑动平均法会比滑动平均法的实时性更强,更加接近当前时刻的观测值。在实际场景下,如果目标的波动较大时,指数滑动平均法会比滑动平均更加接近当前的真实值。那么是不是就说明,指数滑动平均法在任意场景下都比滑动平均法更好呢?不一定。我们来分析一下指数衰减法的误差项,这里为了简便表示,设定 ,同时,将(1)式和(12)式代入公式(11),可得到误差项:
(13)
所以误差项也是呈指数衰减的,越接近当前时刻的误差项权重越大。假如在当前的工程场景中,误差是固定的分布,不受目标的观测值大小影响的话,那么指数滑动平均法会更接近真实值;假如误差会受目标观测值影响,比如我们观测的是一个连续运动的目标,中间突然出现了一个偏离很远的观测点,那么这个点为误检的概率相当大,也就是该观测值的误差比之前其他点的误差要大得多,此时指数加权平均法的结果就会波动较大,结果就不如滑动平均了。
小结:当误差不受观测值大小影响的话,指数滑动平均比滑动平均好;当误差随观测值大小变化时,滑动平均比指数滑动平均更好。
class ExpMovAvg(object):
def __init__(self, decay=0.9):
self.shadow = 0
self.decay = decay
self.first_time = True
def update(self, data):
if self.first_time:
self.shadow = data
self.first_time = False
return data
else:
self.shadow = self.decay*self.shadow+(1-self.decay)*data
return self.shadow
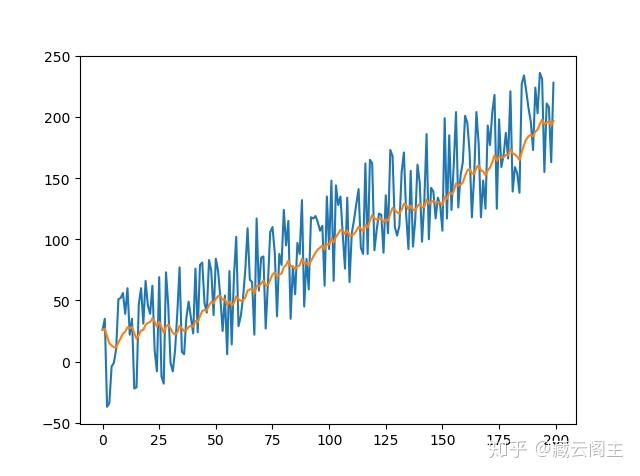 一维数据的指数滑动平均效果
一维数据的指数滑动平均效果
四、SG滤波法
SG滤波法(Savitzky Golay Filter)的核心思想也是对窗口内的数据进行加权滤波,但是它的加权权重是对给定的高阶多项式进行最小二乘拟合得到。它的优点在于,在滤波平滑的同时,能够更有效地保留信号的变化信息,下面我来介绍一下其原理。
我们同样对当前时刻的前后一共2n+1个观测值进行滤波,用k-1阶多项式对其进行拟合。对于当前时刻的观测值,我们用下面的公式进行拟合:
(14)
同样,对于前后时刻(如t-1、t+1、t-2、t+2等时刻)的预测值,我们同样可以用(14)式来计算,这样一共得到2n+1个式子,构成一个矩阵(似乎发不了矩阵,我放个图片吧):

要使得整个矩阵有解,必须满足 2n+1>k,这样我们才能够通过最小二乘法确定参数 、
、
...
。我们把上面的矩阵简化表示为下面公式:
(15)
各个参数下标表示它们各自的维度,如 表示有k行1列的参数。通过最小二乘法,我们可以求得
的解为:
(16)
上标trans表示转置。那么,模型的滤波值为:
(17)
最终可以得到滤波值和观测值之间的关系矩阵:
(18)
算出了B矩阵,我们就能够快速的将观测值转换为滤波值了。
小结:SG滤波法对于数据的观测信息保持的更好,在一些注重数据变化的场合会比较适用。
class SavGol(object):
def __init__(self, window_size=11, rank=2):
assert window_size % 2 == 1
self.window_size = window_size
self.rank = rank
self.size = int((self.window_size - 1) / 2)
self.mm = self.create_matrix(self.size)
self.data_seq = []
def create_matrix(self, size):
line_seq = np.linspace(-size, size, 2*size+1)
rank_seqs = [line_seq**j for j in range(self.rank)]
rank_seqs = np.mat(rank_seqs)
kernel = (rank_seqs.T * (rank_seqs * rank_seqs.T).I) * rank_seqs
mm = kernel[self.size].T
return mm
def update(self, data):
self.data_seq.append(data)
if len(self.data_seq) > self.window_size:
del self.data_seq[0]
padded_data = self.data_seq.copy()
if len(padded_data) < self.window_size:
left = int((self.window_size-len(padded_data))/2)
right = self.window_size-len(padded_data)-left
for i in range(left):
padded_data.insert(0, padded_data[0])
for i in range(right):
padded_data.insert(
len(padded_data), padded_data[len(padded_data)-1])
return (np.mat(padded_data)*self.mm).item()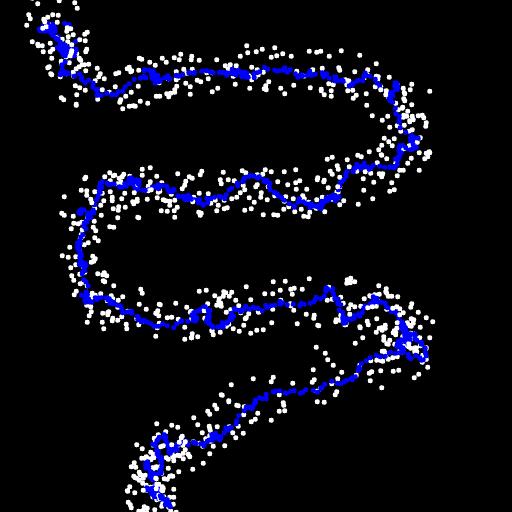
 一维数据的SG滤波效果
一维数据的SG滤波效果
附录
本文图片制作的相关代码。
import cv2
import numpy as np
import matplotlib.pyplot as plt
import imageio
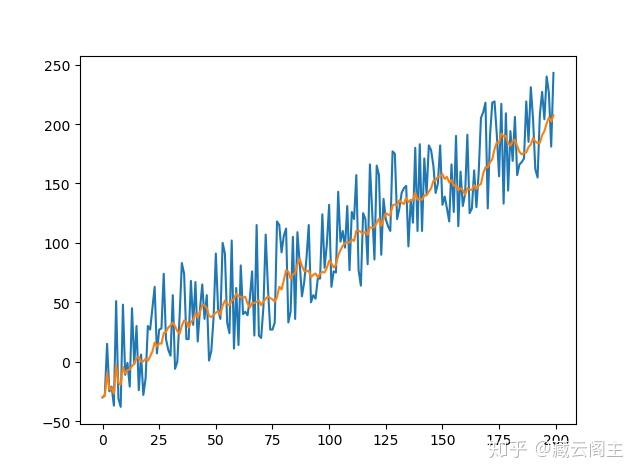
# 一维数据滤波
ma, ema, sg = MovAvg(), ExpMovAvg(), SavGol()
data_list, data_ma, data_ema, data_sg = [], [], [], []
for i in range(200):
data = i+np.random.randint(-50, 50)
data_list.append(data)
data_ma.append(ma.update(data))
data_ema.append(ema.update(data))
data_sg.append(sg.update(data))
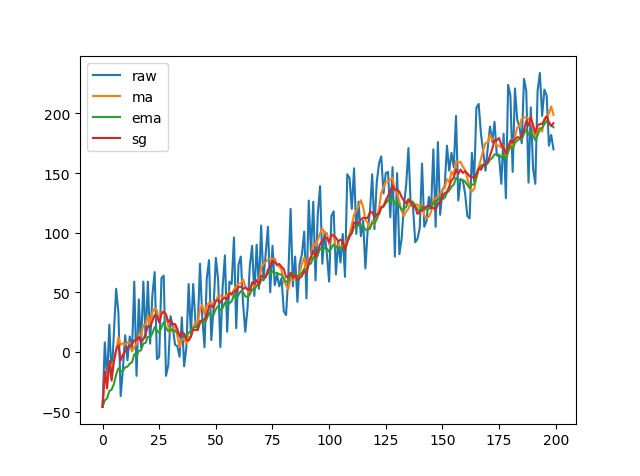
plt.plot(data_list, label='raw')
plt.plot(data_ma, label='ma')
plt.plot(data_ema, label='ema')
plt.plot(data_sg, label='sg')
plt.legend()
plt.show()
# 鼠标轨迹滤波
ma_x, ma_y = MovAvg(), MovAvg()
ema_x, ema_y = ExpMovAvg(), ExpMovAvg()
sg_x, sg_y = SavGol(), SavGol()
def draw_circle(event, x, y, flags, param):
if event == cv2.EVENT_MOUSEMOVE:
sx = np.random.randint(-50, 51)
sy = np.random.randint(-50, 51)
cv2.circle(show, (x+sx, y+sy), 5, (255, 255, 255), -1)
x, y = ma_x.update(x+sx), ma_y.update(y+sy)
cv2.circle(show, (int(x), int(y)), 5, (0, 0, 255), -1)
x, y = ema_x.update(x+sx), ema_y.update(y+sy)
cv2.circle(show, (int(x), int(y)), 5, (0, 255, 0), -1)
x, y = sg_x.update(x+sx), sg_y.update(y+sy)
cv2.circle(show, (int(x), int(y)), 5, (255, 0, 0), -1)
show = np.zeros((1024, 1024, 3), np.uint8)
cv2.namedWindow('image')
buff = []
while True:
cv2.setMouseCallback('image', draw_circle)
cv2.imshow('image', show)
save = cv2.resize(show, (512, 512))
save = cv2.cvtColor(save, cv2.COLOR_BGR2RGB)
buff.append(save)
if cv2.waitKey(100) == ord('q'):
break
cv2.destroyAllWindows()
imageio.mimwrite('test.gif', buff, 'GIF', duration=0.1)