原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 周学伟
安装之前:首先确保已经正常制作了ros工作空间并且安装了rbx1功能包:
cd ~/catkin_ws/src git clone https://github.com/pirobot/rbx1.git cd rbx1 git checkout indigo-devel cd ~/catkin_ws catkin_make source ~/catkin_ws/devel/setup.bash rospack profile
1.安装simulator
sudo apt-get install ros-indigo-arbotix-*
注意:一定要删除任何早期版本的arbotix依赖。
rospack profile
2. 为了确保一切工作,确保roscore运行,然后启动模拟turtlebot如下
roslaunch rbx1_bringup fake_turtlebot.launch 输出信息如下: .. logging to /root/.ros/log/c0433730-e414-11e5-8d90-c48e8f5baa47/roslaunch-zxwubuntu-Aspire-V3-572G-3649.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://zxwubuntu-Aspire-V3-572G:56323/ SUMMARY ======== CLEAR PARAMETERS * /arbotix/ PARAMETERS * /arbotix/baud: 115200 * /arbotix/controllers/base_controller/Kd: 12 * /arbotix/controllers/base_controller/Ki: 0 * /arbotix/controllers/base_controller/Ko: 50 * /arbotix/controllers/base_controller/Kp: 12 * /arbotix/controllers/base_controller/accel_limit: 1.0 * /arbotix/controllers/base_controller/base_frame_id: base_footprint * /arbotix/controllers/base_controller/base_ 0.26 * /arbotix/controllers/base_controller/ticks_meter: 4100 * /arbotix/controllers/base_controller/type: diff_controller * /arbotix/port: /dev/ttyUSB0 * /arbotix/rate: 20 * /arbotix/read_rate: 20 * /arbotix/sim: True * /arbotix/sync_read: True * /arbotix/sync_write: True * /arbotix/write_rate: 20 * /robot_description: <?xml version="1.... * /robot_state_publisher/publish_frequency: 20.0 * /rosdistro: indigo * /rosversion: 1.11.16 * /use_sim_time: False NODES / arbotix (arbotix_python/arbotix_driver) robot_state_publisher (robot_state_publisher/state_publisher) ROS_MASTER_URI=http://localhost:11311 core service [/rosout] found process[arbotix-1]: started with pid [3671] process[robot_state_publisher-2]: started with pid [3672]
3.使用一个模型的pi-机器人,运行命令:
roslaunch rbx1_bringup fake_pi_robot.launch
输出信息如下:
PARAMETERS * /arbotix/baud: 115200 * /arbotix/controllers/base_controller/Kd: 12 * /arbotix/controllers/base_controller/Ki: 0 * /arbotix/controllers/base_controller/Ko: 50 * /arbotix/controllers/base_controller/Kp: 12 * /arbotix/controllers/base_controller/accel_limit: 1.0 * /arbotix/controllers/base_controller/base_frame_id: base_link * /arbotix/controllers/base_controller/base_ 0.26 * /arbotix/controllers/base_controller/ticks_meter: 4100 * /arbotix/controllers/base_controller/type: diff_controller * /arbotix/joints/arm_elbow_flex_joint/id: 3 * /arbotix/joints/arm_elbow_flex_joint/invert: True * /arbotix/joints/arm_elbow_flex_joint/max_speed: 100 * /arbotix/joints/arm_elbow_flex_joint/neutral: 512 * /arbotix/joints/arm_shoulder_lift_joint/id: 2 * /arbotix/joints/arm_shoulder_lift_joint/invert: True * /arbotix/joints/arm_shoulder_lift_joint/max_speed: 100 * /arbotix/joints/arm_shoulder_lift_joint/neutral: 512 * /arbotix/joints/arm_shoulder_pan_joint/id: 1 * /arbotix/joints/arm_shoulder_pan_joint/invert: False * /arbotix/joints/arm_shoulder_pan_joint/max_angle: 145 * /arbotix/joints/arm_shoulder_pan_joint/max_speed: 100 * /arbotix/joints/arm_shoulder_pan_joint/min_angle: -145 * /arbotix/joints/arm_shoulder_pan_joint/neutral: 512 * /arbotix/joints/arm_wrist_flex_joint/id: 4 * /arbotix/joints/arm_wrist_flex_joint/invert: True * /arbotix/joints/arm_wrist_flex_joint/max_angle: 90 * /arbotix/joints/arm_wrist_flex_joint/max_speed: 100 * /arbotix/joints/arm_wrist_flex_joint/min_angle: -90 * /arbotix/joints/arm_wrist_flex_joint/neutral: 512 * /arbotix/joints/gripper_joint/id: 5 * /arbotix/joints/gripper_joint/invert: False * /arbotix/joints/gripper_joint/max_angle: 25 * /arbotix/joints/gripper_joint/max_speed: 100 * /arbotix/joints/gripper_joint/min_angle: -20 * /arbotix/joints/gripper_joint/neutral: 512 * /arbotix/joints/head_pan_joint/id: 6 * /arbotix/joints/head_pan_joint/invert: False * /arbotix/joints/head_pan_joint/max_angle: 145 * /arbotix/joints/head_pan_joint/max_speed: 100 * /arbotix/joints/head_pan_joint/min_angle: -145 * /arbotix/joints/head_pan_joint/neutral: 512 * /arbotix/joints/head_tilt_joint/id: 7 * /arbotix/joints/head_tilt_joint/invert: False * /arbotix/joints/head_tilt_joint/max_angle: 90 * /arbotix/joints/head_tilt_joint/max_speed: 100 * /arbotix/joints/head_tilt_joint/min_angle: -90 * /arbotix/joints/head_tilt_joint/neutral: 512 * /arbotix/port: /dev/ttyUSB0 * /arbotix/rate: 20 * /arbotix/read_rate: 20 * /arbotix/sim: True * /arbotix/sync_read: True * /arbotix/sync_write: True * /arbotix/write_rate: 20 * /robot_description: <?xml version="1.... * /robot_state_publisher/publish_frequency: 20.0 * /rosdistro: indigo * /rosversion: 1.11.16 * /use_sim_time: False
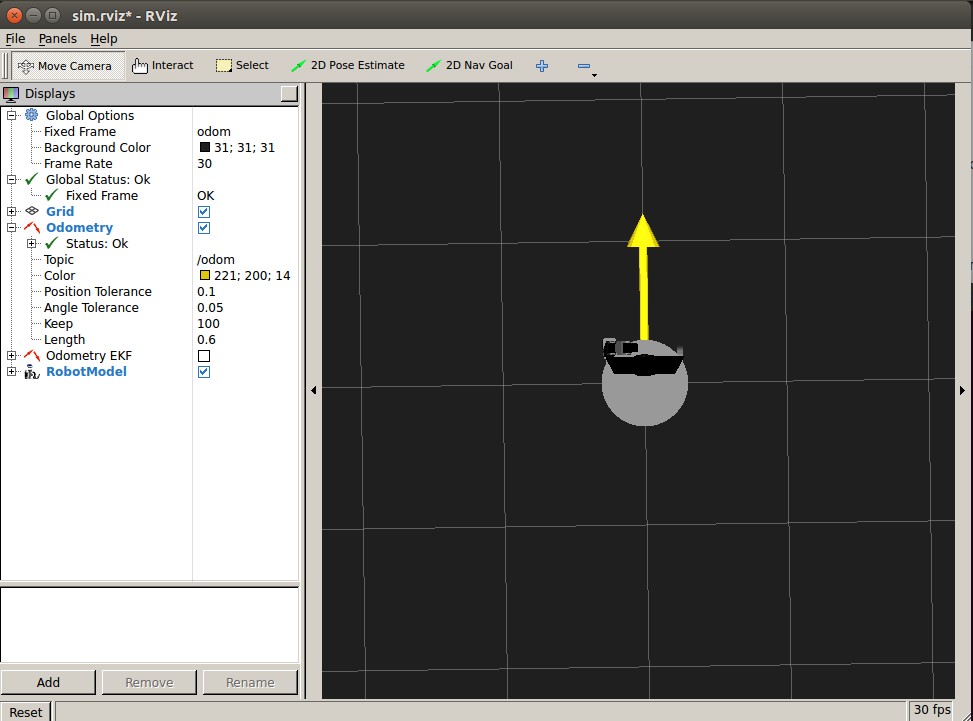
4.接下来,把rviz所以我们可以观察模拟机器人在行动:
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
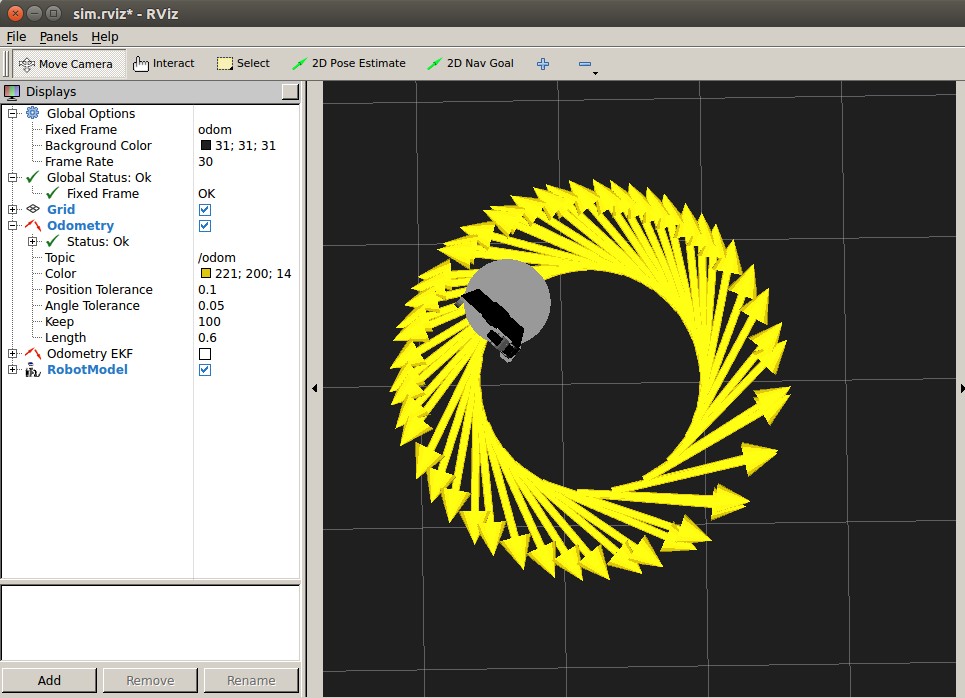
5.发布消息,使机器人移动。要测试模拟,打开另一个终端窗口,并运行以下要使模拟机器人在逆时针方向移动:
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
6.需要停止机器人 ,在同一个终端窗口式Ctrl-C,或者发布空Twist message:
rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}'