启动ROS Master
启动小海龟仿真器

启动海龟控制节点(方向键控制海龟运动)

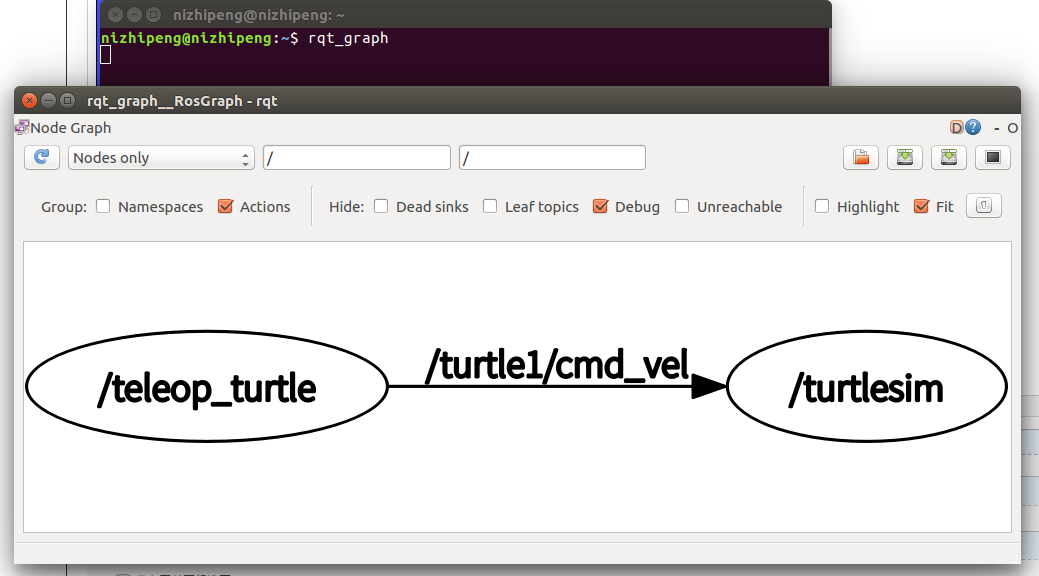
rqt_graph可视化工具
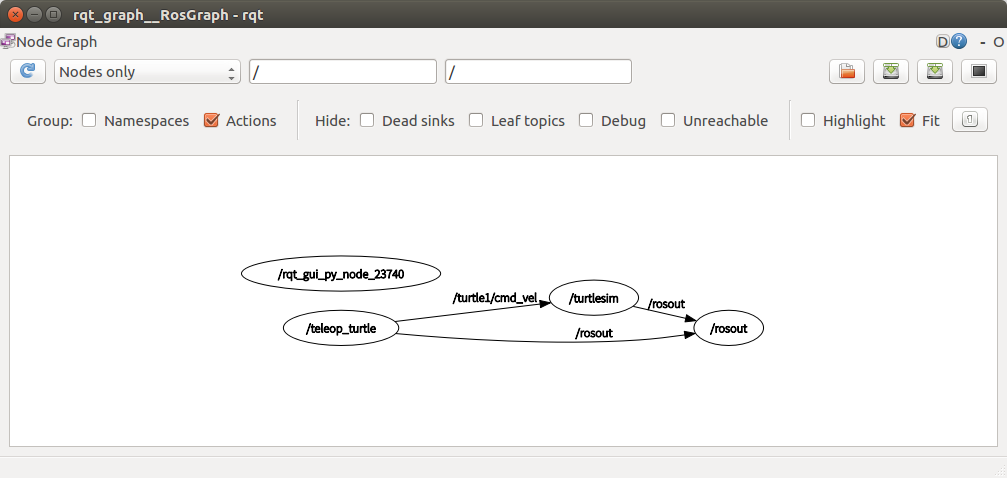
/rosout节点必须存在,订阅所有节点的日志信息。
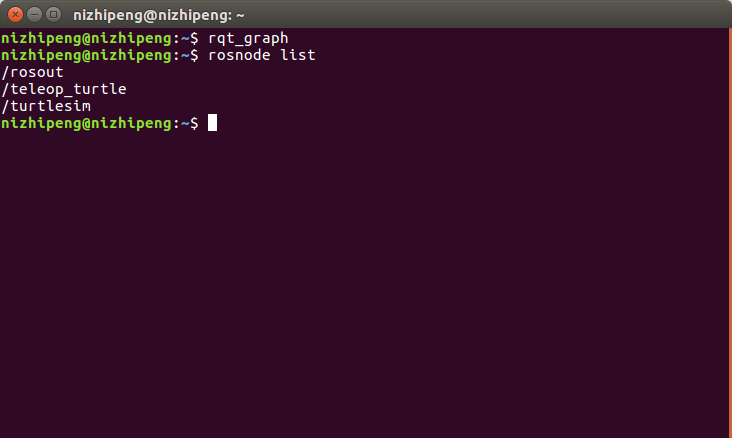
当前系统当中存在的节点。
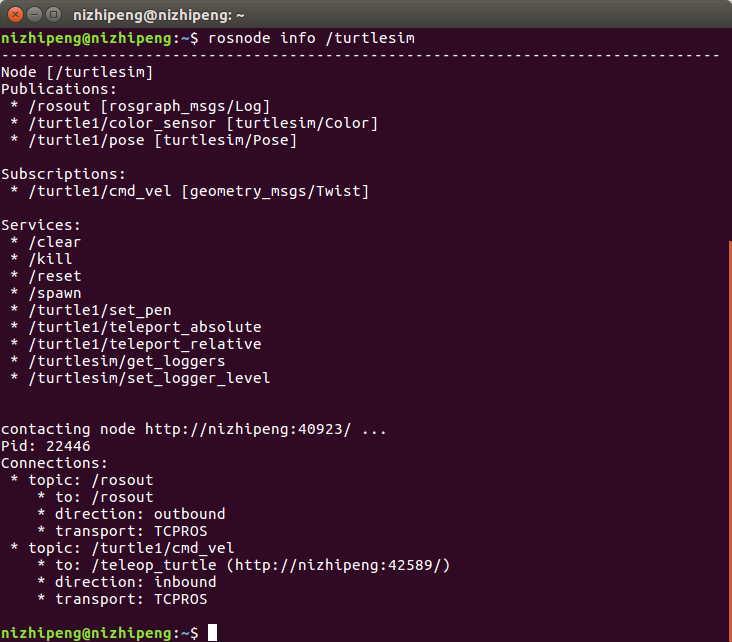
了解当前节点的具体信息,这些信息包含了发布的话题Publications,订阅的话题Subscriptions,提供了服务Services以及ID号。
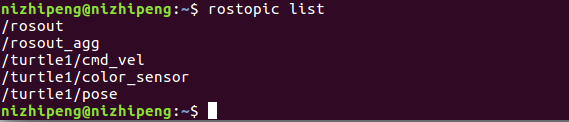
显示当前系统中的话题(订阅,或发布)。
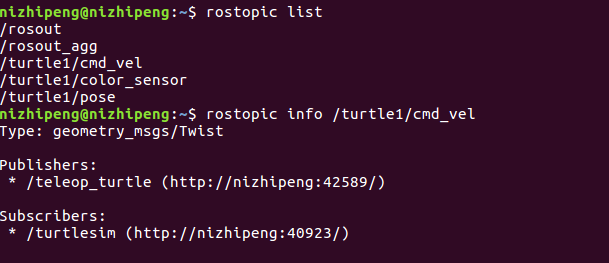
了解以上话题(/turtle1/cmd_vel)的具体信息,即发布者以及订阅者。
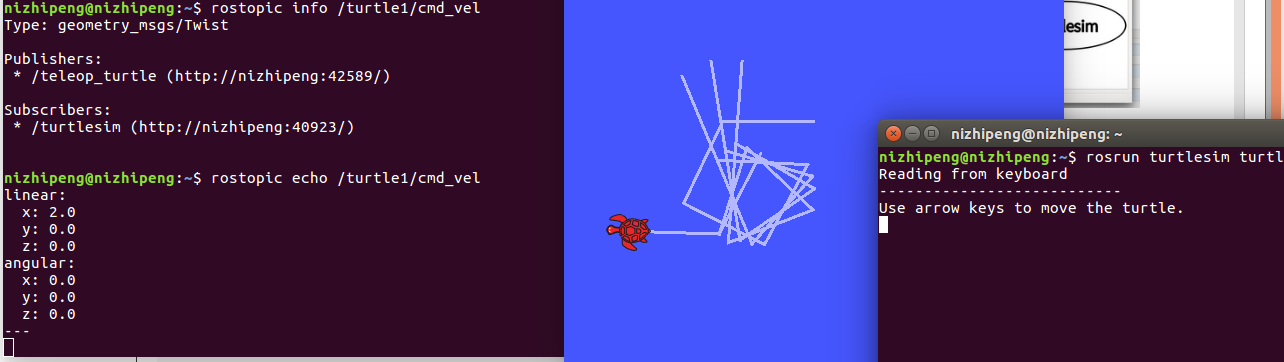
监听话题。

发布话题:rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear 再按Tab键。
只能发布一次。

按10次频率运动。
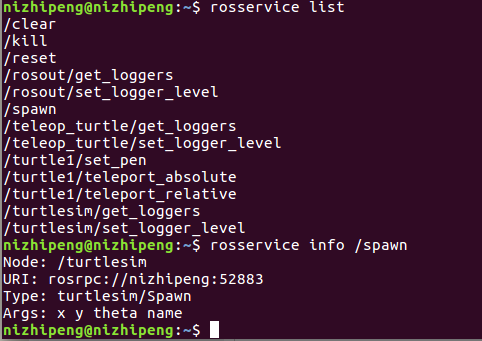
当前服务,与某服务的具体信息(节点,数据类型,参数)。该服务主要作用是生成一只新海龟。

生成新海龟,rosservice call /spawn 再输入Tab
rqt_plot可视化工具
终端输入rqt_plot
左上角订阅话题信息,数据可视化输出。
