构建调试Linux内核(32位)网络代码的环境MenuOS系统
最后的目录:
说明:qemu qemu-system-i386 qemu-system-x86_64
qemu-system-i386是32位的QEMU的命令
qemu-system-x86_64是64位的QEMU的命令
qemu 是软链接到qemu-system-i386,二者是一样的,如果qemu没有软链接,是无法执行的。
以下过程是回忆所写,有些小细节可能记错了,部分命令是手敲的,不一定对,仅供参考。
安装,编译linux内核
步骤 1:下载,配置编译为32位
#如果想编译为64位,请直接忽略此步骤最后一条命令,接步骤二开始,但是后面需要更改一些qemu命令的格式,要都按照64位来做,后面我大概提一下,但是具体细节我没做,所以有什么坑我也不知道。
mkdir LinuxKernel #创建一个项目目录
cd LinuxKernel
wget https://cdn.kernel.org/pub/linux/kernel/v5.x/linux-5.0.1.tar.xz #下载linux-5.0.1的内核,当然也可以下载其他版本的,就是有点慢。
xz -d linux-5.0.1.tar.xz #解压
tar -xvf linux-5.0.1.tar
cd linux-5.0.1
sudo apt install build-essential flex bison libssl-dev libelf-dev libncurses-dev #安装内核编译所需的库
make i386_defconfig #生成32位x86的配置文件
步骤 2:配置编译需要debug信息
#针对32位的,步骤二可以在这步做,也可以在后面gdb调试那一步之前做,我当时是在那一步之前做的,但是现在想想没必要编译两次,因为编译真的需要很久,64位就在这儿做吧。
make menuconfig
#执行make menuconfig之后,会跳出一个图形化界面,就在图形化界面中完成以下操作,如果没有跳出,或者报错,自行解决界面大小适应问题:安装vmware tool,或者在设置中调整分辨率。
1:选择 Kernel hacking
2:选择 Compile-time checks and compiler options
3:选择 [ ]Compile the kernel with debug info
4:按Y 前面就多了一个 [*] Compile the kernel with debug info
5:选择 save
6:按 esc,直到退出图形化界面
步骤 3:编译
make
漫长的等待开始了,直到编译完成。
步骤 4:升级内核
#可以忽略此步骤!!!!因为这个步骤是老师上课讲的的,但是我做的时候,机子在reboot的时候总是错,所以后面就跳过了。
#欢迎大佬指出问题
uname -a
sudo make modules_install # ⚠️安装前通过系统快照备份系统,以防出现故障前功尽弃
sudo make install
sudo update-grub
reboot
uname -a
制作根文件系统
步骤 1:QEMU虚拟机加载内核
cd ~/LinuxKernel/
sudo apt install qemu # 安装qemu命令
qemu-system-i386 -kernel linux-5.0.1/arch/x86/boot/bzImage #qemu虚拟机加载 linux-5.0.1内核,这条命令可以不用执行,因为后面构造menuOS的makefile中是包含了这条命令的
步骤 2: 构造MenuOS
#下载menu系统,并在LinuxKernel目录下建一个子目录rootfs,当作menuOS的根目录
git clone https://github.com/mengning/menu.git
mkdir rootfs
步骤2.1: 安装libc6-dev-i386和修改Makefile
安装libc6-dev-i386
sudo apt-get install libc6-dev-i386
修改makefile,我的做法是方式二
方式一
cd menu
vim Makefile
qemu -kernel ../linux-3.18.6/arch/x86/boot/bzImage -initrd ../rootfs.img #修改前
qemu-system-i386 -kernel ../linux-5.0.1/arch/x86/boot/bzImage -initrd ../rootfs.img #修改后
wq
64位的就修改为 qemu-system-x86_64 -kernel ../linux-5.0.1/arch/x86_64/boot/bzImage -initrd ../rootfs.img
方式二
#如果不想使用qemu-system-i386,仍然想使用qemu命令,就改为如下,然后执行一个软链接
cd menu
vim Makefile
qemu -kernel ../linux-3.18.6/arch/x86/boot/bzImage -initrd ../rootfs.img #修改前
qemu -kernel ../linux-5.0.1/arch/x86/boot/bzImage -initrd ../rootfs.img #修改后
wq
sudo ln -s /usr/bin/qemu-system-i386 /usr/bin/qemu
步骤2.2 初始化根目录
linux启动后期会在根⽬录中寻找⼀个应⽤程序来运⾏,在根⽬录下提供init是⼀种可选⽅案
#在menu目录下执行一下命令
make rootfs
结果应该是这样
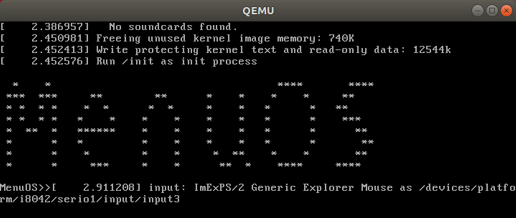
回车,然后执行help命令查看当前构建的menuOS系统中的命令 ,其他命令都可以,但是quit命令无效,hh。

gdb 调试
在执行gdb 调试之前,保证make menuconfig那个步骤已经执行,不然编译的内核系统不含调试信息。
步骤 1:启动gdb server
1 关闭 之前打开的menuOS系统界面
2 执行 qemu -kernel ../linux-5.0.1/arch/x86/boot/bzImage -initrd ../rootfs.img -append nokaslr -s -S
为什么和老师的不一样?em 我也不知道为什么,可能teacher给的命令只适合teache的机子,反正我又是一堆错,这儿写的命令也可能不适合你的机子。
所以多提供两条参考命令,反正我的机子是不行的,说不定你的机子行呢,如下
qemu -kernel ../linux-5.0.1/arch/x86/boot/bzImage -initrd ../rootfs.img -s -S #(我的机子执行之后调试停不下来)
(32)qemu -kernel ../linux-5.0.1/arch/x86/boot/bzImage -hda rootfs.img -append "root=/dev/sda init=/init nokaslr" -s -S
(64)qemu-system-x86_64 -kernel ../linux-5.0.1/arch/x86_64/boot/bzImage -hda rootfs.img -append "root=/dev/sda init=/init nokaslr" -s -S
#(调试的时候,中途报错:VFS,unable to mount rootfs on unkwon-block(x,x))
步骤2 gdb客户端连接gdb server
#打开另一个终端
gdb
file ~/LinuxKernel/linux-5.0.1/vmlinux
break start_kernel
target remote:1234
c
list
如图
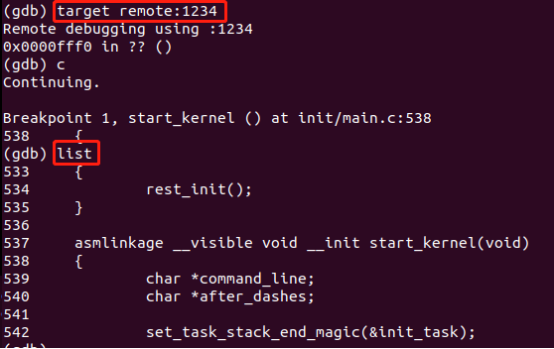
多打几个断点看看,内核启动的过程,具体细节再研究研究,看我后续部分
构建MenuOS的网络功能
参考老师的实验楼:https://www.shiyanlou.com/courses/1198
步骤1: 将 TCP 网络通信程序的服务端集成到 MenuOS 系统中
cd ~/LinuxKernel
git clone https://github.com/mengning/linuxnet.git
cd linuxnet/lab2
make
cd ../../menu/
make rootfs #改一下Makefile
步骤2: 将 TCP 网络通信程序的客户端集成到 MenuOS 系统中
cd ~/LinuxKernel
git clone https://github.com/mengning/linuxnet.git
cd linuxnet/lab3
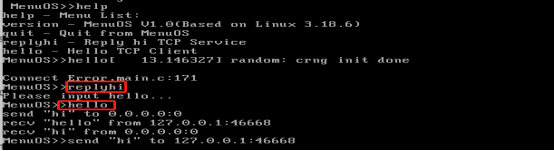
make rootfs #报错之后,修改Makefile
结果如图:menuOS下面已经多了replyhi,和 hello命令,后面再看细节。
后续。。。
linux 内核的启动过程
start_kernel 部分代码
asmlinkage __visible void __init start_kernel(void)
{
char *command_line;
char *after_dashes;
set_task_stack_end_magic(&init_task); #设置0号进程的栈边界。可以通过 gdb 调试查看 p init_task->pid 看到它的进程号
smp_setup_processor_id();
debug_objects_early_init();
cgroup_init_early();
local_irq_disable();
early_boot_irqs_disabled = true;
/*
* Interrupts are still disabled. Do necessary setups, then
* enable them. #设置中断表
*/
boot_cpu_init();
page_address_init(); #初始化虚拟页地址
pr_notice("%s", linux_banner);
setup_arch(&command_line);
/*
* Set up the the initial canary and entropy after arch
* and after adding latent and command line entropy.
*/
add_latent_entropy();
add_device_randomness(command_line, strlen(command_line));
boot_init_stack_canary();
mm_init_cpumask(&init_mm);
setup_command_line(command_line);
setup_nr_cpu_ids();
setup_per_cpu_areas();
smp_prepare_boot_cpu(); /* arch-specific boot-cpu hooks */
boot_cpu_hotplug_init();
start_kernel 代码分析:参考博客:https://www.cnblogs.com/yjf512/p/5999532.html
说明:init_task 它是谁?他是0号进程,本质是一个结构体task_strcuk,即通用的进程描述符,它在哪创建?在cpu_startup_entry处创建,参考:https://www.cnblogs.com/dakewei/p/11558027.html
结构体task_strcuk是什么,参考:https://blog.csdn.net/qq_25424545/article/details/80289683
0号进程是如何调用rest_init创建1,2号进程 的,以及他们之间的关系?参考:https://www.cnblogs.com/alantu2018/p/8526970.html
如何往menu系统中添加tcp通讯功能的
以linuxnet/lab3为例
main.c
步骤 1 重启网卡
BringUpNetInterface
为什么呢?为了配置网卡协议,以及绑定主机ip。
步骤2 构造命令和对应的handle函数
MenuConfig("replyhi", "Reply hi TCP Service", StartReplyhi);
MenuConfig中主要是设置一个结构体,将cmd和handle关联起来
例如在menu中执行replyhi,就会调用相应的函数StartReplyhi,StartReplyhi中子进程负责调用replyhi,replyhi就是执行tcp服务器的代码。
StartReplyhi
int StartReplyhi(int argc, char *argv[])
{
int pid;
/* fork another process */
pid = fork();
if (pid < 0)
{
/* error occurred */
fprintf(stderr, "Fork Failed!");
exit(-1);
}
else if (pid == 0)
{
/* child process */
Replyhi();
printf("Reply hi TCP Service Started!
");
}
else
{
/* parent process */
printf("Please input hello...
");
}
}
Replyhi
int Replyhi()
{
char szBuf[MAX_BUF_LEN] = "�";
char szReplyMsg[MAX_BUF_LEN] = "hi�";
InitializeService();
while (1)
{
ServiceStart();#宏定义 包括socket,bind,listen,accpet等函数
RecvMsg(szBuf);
SendMsg(szReplyMsg); #宏定义,就是调用recv函数
ServiceStop();
}
ShutdownService();#宏定义,就是调用close函数
return 0;
}
socket,bind,listen,accpet这些函数对应着以下系统调用
switch (call) {
case SYS_SOCKET:
err = __sys_socket(a0, a1, a[2]);
break;
case SYS_BIND:
err = __sys_bind(a0, (struct sockaddr __user *)a1, a[2]);
break;
case SYS_CONNECT:
err = __sys_connect(a0, (struct sockaddr __user *)a1, a[2]);
break;
case SYS_LISTEN:
err = __sys_listen(a0, a1);
break;
case SYS_ACCEPT:
err = __sys_accept4(a0, (struct sockaddr __user *)a1,
(int __user *)a[2], 0);
break;
case SYS_GETSOCKNAME:
err =
__sys_getsockname(a0, (struct sockaddr __user *)a1,
(int __user *)a[2]);
break;
case SYS_GETPEERNAME:
...
进程和系统调用之间是怎么进行的?
进程可以跳转到的内核中的位置叫做system_call。在此位置的过程检查系统调用号,它将告诉内核进程请求的服务是什么。然后,它再查找系统调用表sys_call_table,找到希望调用的内核函数的地址,并调用此函数。
gdb 调试lab3的看一看效果
gdb
file vmlinux
break sys_socketcall
target remote:1234
c
list
list
n
n
s 进入__sys_socket
bt #查看堆栈
输出如下
(gdb) bt
#0 __sys_socket (family=2, type=2, protocol=0) at net/socket.c:1327 #sys_socket 的内容主要就是上面的switch中的结果了
#1 0xc1757b98 in __do_sys_socketcall (args=<optimized out>,
call=<optimized out>) at net/socket.c:2555
#2 __se_sys_socketcall (call=1, args=-1076677360) at net/socket.c:2527 #找到了对应socket类的系统调用函数总入口地址
#3 0xc1002095 in do_syscall_32_irqs_on (regs=<optimized out>) #syscall_trace_enter取出系统调用号 nr;到sys_call_table中去找到nr号对应的系统调用服务程序去执行后返回值放入ax。
at arch/x86/entry/common.c:334
#4 do_fast_syscall_32 (regs=0xc7895fb4) at arch/x86/entry/common.c:397 #做一些额外的设置,里面可是有0x80,然后调用do_syscall_32_irqs_on
#5 0xc199141b in entry_SYSENTER_32 () at arch/x86/entry/entry_32.S:887 #保存现场将相关寄存器中的值压栈(rax,rsi,rdi等)
#6 0x00000001 in ?? () #上层就是用户进程了
#7 0xbfd33510 in ?? ()
系统调用咋回事?参考:https://docs.huihoo.com/joyfire.net/6-1.html
更多socke函数的分析 参考: https://blog.csdn.net/zhangskd/category_9263957.html