很多遥控车是用Arduino来控制,同样也可以用Micro:bit来控制。这篇文章我们就来做个测试。
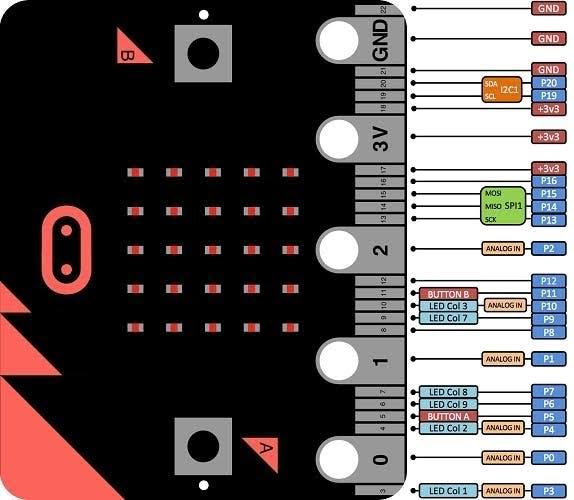
这次需要用到扩展板,管脚比较多,请参考下图
一、材料:
•micro:bit 二片
•micro:bit扩展板
•自走车车体:motoduino的车体
•L298N马达驱动模块
•18650电池盒及电池

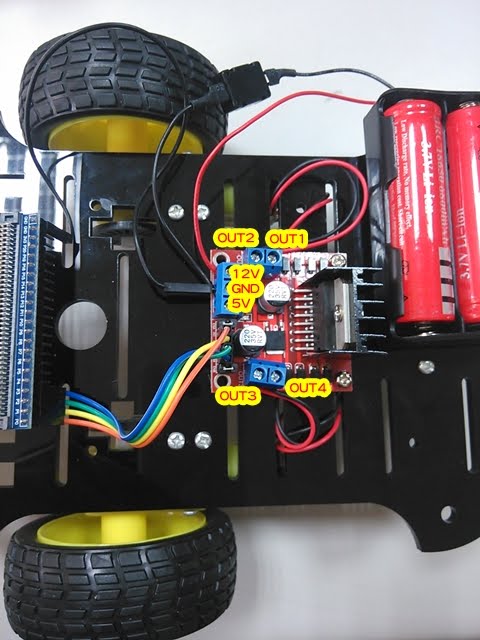
二、连线
•L298N的out1、out2与右车轮的马达连结
•L298N的out3、out4与左车轮的马达连结
•L298N的in1、in2、in3、in4分别与micro:bit的P0、P1、P2、P3来连接
•L298N的ENA、ENB先jumper住(以最快速度来跑),事后要控制速度再把ENA接P4、ENB接P5
•L298N的12V接18650电池盒的正极
•L298N的GND分别接18650电池盒的负极及micro:bit的GND
•L298N的5V不接线(会把micro:bit给烧坏)
三、简易测试
•L298N控制马达的正转
◦右马达:in1为LOW、in2为HIGH (ENA控制转速 0~255)
◦左马达:in3为LOW、in4为HIGH (ENB控制转速 0~255)
•L298N控制马达的正转
◦右马达:in1为HIGH、in2为LOW (ENA控制转速 0~255)
◦左马达:in3为HIGH、in4为LOW (ENB控制转速 0~255)
•L298N控制马达的停止
◦右马达:in1为LOW、in2为LOW 或 in1为HIGH、in2为HIGH
◦左马达:in3为LOW、in4为LOW 或 in3为HIGH、in4为HIGH
•程序如下:

四、测试车子前进、后退、左右转
•L298N的in1、in2、in3、in4分别与micro:bit的P0、P1、P2、P8来连接
•按 micro:bit 的A+B前进车子、按A向左转、按B向右转、摇动向后退
•程序如下:

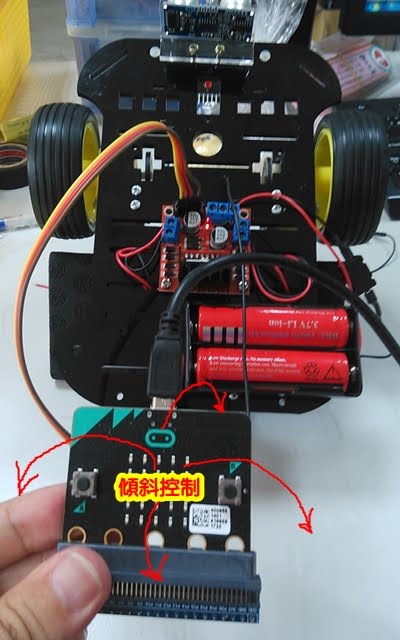
五、利用板子倾斜度控制车子前进、后退、左右转
•L298N的in1、in2、in3、in4分别与micro:bit的P0、P1、P2、P8来连接
•当 micro:bit 前向倾(logo较低)车子前进、向后倾(logo较高)车子后退、向左倾(向左倾斜)车子左转、向右倾(向右倾斜)车子右转、按A键时车子停止
•程序如下:

测试画面:
六、利用另一块micro:bit板子来控制车子前进、后退、左右转
•自走车上micro:bit的程序,加入广播的功能,修改如下:



准备另一块micro:bit 当遥控器,程序如下:
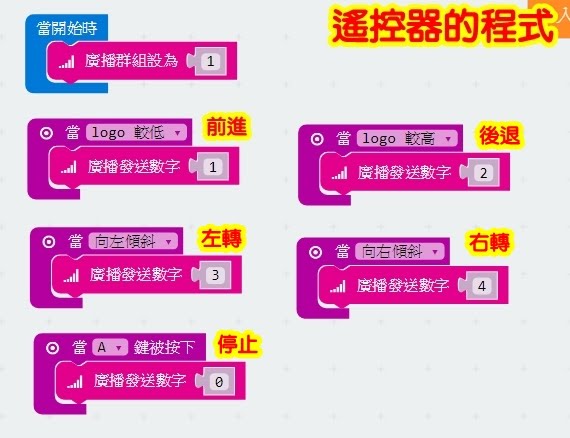
测试画面如下

原文参考
https://mp.weixin.qq.com/s?__biz=MzU0MTg0ODIzNA==&mid=2247484453&idx=1&sn=bc1cdf347fca75b6aee791981b682952&chksm=fb22e3e0cc556af6194e4b09baa6e625a9309649e7da7b3251ff98e01b8a23ae098ab627fa9a#rd
