

实 验 报 告(拓展实验1)
多级反馈队列调度算法
课程名称 操作系统实验
学生学院 计算机学院
专业班级 17网络工程一班
学 号 31170050**
学生姓名 陈鸿
指导教师 林穗
2019 年 12 月 6 日
目录
void InsertFinish(PCB *in); /*将进程插入到完成队列尾部*/ 5
void InsertPrio(ReadyQueue *in); /*创建就绪队列,规定优先数越小,优先级越低*/ 5
void PrioCreate(); /*创建就绪队列输入函数*/ 5
void GetFirst(ReadyQueue *queue); /*取得某一个就绪队列中的队头进程*/ 5
void InsertLast(PCB *in,ReadyQueue *queue); /*将进程插入到就绪队列尾部*/ 5
void ProcessCreate(); /*进程创建函数*/ 5
void RoundRun(ReadyQueue *timechip); /*时间片轮转调度算法*/ 5
void MultiDispatch(); /*多级调度算法,每次执行一个时间片*/ 5
Tips:建议打开word【导航视图】与【批注】阅读。
拓展实验1:多级反馈队列调度算法
实验目的
分析操作系统的核心功能模块,理解相关功能模块实现的数据结构和算法,并加以实现,加深对操作系统原理和实现过程的理解。本次实验: 分析并实现多级反馈队列调度算法的模拟。
二、实验内容
多级反馈队列调度算法的概念:
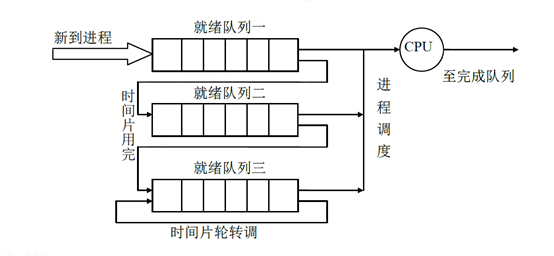
是一种根据先来先服务原则给就绪队列排序,为就绪队列赋予不同的优先级数,不同的时间片,按照优先级抢占CPU的调度算法。算法的实施过程如下:
(1)按照先来先服务原则排序,设置N个就绪队列为Q1,Q2...QN,每个队列中都可以放很多作业;
(2)为这N个就绪队列赋予不同的优先级,第一个队列的优先级最高,第二个队列次之,其余各队列的优先权逐个降低;
(3)设置每个就绪队列的时间片,优先权越高,算法赋予队列的时间片越小。时间片大小的设定按照实际作业(进程)的需要调整;
(4)进程在进入待调度的队列等待时,首先进入优先级最高的Q1等待。
(5)首先调度优先级高的队列中的进程。若高优先级中队列中已没有调度的进程,则调度次优先级队列中的进程。例如:Q1,Q2,Q3三个队列,只有在Q1中没有进程等待时才去调度Q2,同理,只有Q1,Q2都为空时才会去调度Q3。
(6)对于同一个队列中的各个进程,按照时间片轮转法调度。比如Q1队列的时间片为N,那么Q1中的作业在经历了时间片为N的时间后,若还没有完成,则进入Q2队列等待,若Q2的时间片用完后作业还不能完成,一直进入下一级队列,直至完成。
(7)在低优先级的队列中的进程在运行时,又有新到达的作业,那么在运行完这个时间片后,CPU马上分配给新到达的作业即抢占式调度CPU。
应用范围:
此算法应用于同一个资源的多个使用者可分优先级使用资源的情况。
三、实现思路
1、设置多个就绪队列,并给队列赋予不同的优先级数,第一个最高,依次递减。
2、赋予各个队列中进程执行时间片的大小,优先级越高的队列,时间片越小。
3、当一个新进程进入内存后,首先将其放入一个对列末尾,如果在一个时间片
结束时尚未完成,将其转入第二队列末尾。
4、当一个进程从一个对列移至第n个队列后,便在第n个队列中采用时间片轮转执行完。
5、仅当时间片空闲时,才调度第二个队列中的进程。
(1~i-1)空闲时,才调度i,如果处理机正在第i队列中运行,又有新进程进入优先权较高
队列,则新进程抢占处理机,将正在运行的进程放入第i队列队尾,将处理机分给新进程。
四、主要的数据结构
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
typedef struct node /*进程节点信息*/
{
char name[20]; /*进程的名字*/
int prio; /*进程的优先级*/
int round; /*分配CPU的时间片*/
int cputime; /*CPU执行时间*/
int needtime; /*进程执行所需要的时间*/
char state; /*进程的状态,W--就绪态,R--执行态,F--完成态*/
int count; /*记录执行的次数*/
struct node *next; /*链表指针*/
}PCB;
typedef struct Queue /*多级就绪队列节点信息*/
{
PCB *LinkPCB; /*就绪队列中的进程队列指针*/
int prio; /*本就绪队列的优先级*/
int round; /*本就绪队列所分配的时间片*/
struct Queue *next; /*指向下一个就绪队列的链表指针*/
}ReadyQueue;
PCB *run=NULL,*finish=NULL; /*定义三个队列,就绪队列,执行队列和完成队列*/
ReadyQueue *Head = NULL; /*定义第一个就绪队列*/
int num; /*进程个数*/
int ReadyNum; /*就绪队列个数*/
void Output(); /*进程信息输出函数*/
void InsertFinish(PCB *in); /*将进程插入到完成队列尾部*/
void InsertPrio(ReadyQueue *in); /*创建就绪队列,规定优先数越小,优先级越低*/
void PrioCreate(); /*创建就绪队列输入函数*/
void GetFirst(ReadyQueue *queue); /*取得某一个就绪队列中的队头进程*/
void InsertLast(PCB *in,ReadyQueue *queue); /*将进程插入到就绪队列尾部*/
void ProcessCreate(); /*进程创建函数*/
void RoundRun(ReadyQueue *timechip); /*时间片轮转调度算法*/
void MultiDispatch(); /*多级调度算法,每次执行一个时间片*/
int main(void)
{
PrioCreate(); /*创建就绪队列*/
ProcessCreate();/*创建就绪进程队列*/
MultiDispatch();/*算法开始*/
Output(); /*输出最终的调度序列*/
return 0;
}
void Output() /*进程信息输出函数*/
{
ReadyQueue *print = Head;
PCB *p;
printf("进程名 优先级 轮数 cpu时间 需要时间 进程状态 计数器 ");
while(print)
{
if(print ->LinkPCB != NULL)
{
p=print ->LinkPCB;
while(p)
{
printf("%s %d %d %d %d %c %d ",p->name,p->prio,p->round,p->cputime,p->needtime,p->state,p->count);
p = p->next;
}
}
print = print->next;
}
p = finish;
while(p!=NULL)
{
printf("%s %d %d %d %d %c %d ",p->name,p->prio,p->round,p->cputime,p->needtime,p->state,p->count);
p = p->next;
}
p = run;
while(p!=NULL)
{
printf("%s %d %d %d %d %c %d ",p->name,p->prio,p->round,p->cputime,p->needtime,p->state,p->count);
p = p->next;
}
}
void InsertFinish(PCB *in) /*将进程插入到完成队列尾部*/ {
PCB *fst;
fst = finish;
if(finish == NULL)
{
in->next = finish;
finish = in;
}
else
{
while(fst->next != NULL)
{
fst = fst->next;
}
in ->next = fst ->next;
fst ->next = in;
}
}
void InsertPrio(ReadyQueue *in) /*创建就绪队列,规定优先数越小,优先级越低*/
{
ReadyQueue *fst,*nxt;
fst = nxt = Head;
if(Head == NULL) /*如果没有队列,则为第一个元素*/
{
in->next = Head;
Head = in;
}
else /*查到合适的位置进行插入*/
{
if(in ->prio >= fst ->prio) /*比第一个还要大,则插入到队头*/
{
in->next = Head;
Head = in;
}
else
{
while(fst->next != NULL) /*移动指针查找第一个别它小的元素的位置进行插入*/
{
nxt = fst;
fst = fst->next;
}
if(fst ->next == NULL) /*已经搜索到队尾,则其优先级数最小,将其插入到队尾即可*/
{
in ->next = fst ->next;
fst ->next = in;
}
else /*插入到队列中*/
{
nxt = in;
in ->next = fst;
}
}
}
}
void PrioCreate() /*创建就绪队列输入函数*/
{
ReadyQueue *tmp;
int i;
printf("输入就绪队列的个数: ");
scanf("%d",&ReadyNum);
printf("输入每个就绪队列的CPU时间片: ");
for(i = 0;i < ReadyNum; i++)
{
if((tmp = (ReadyQueue *)malloc(sizeof(ReadyQueue)))==NULL)
{
perror("malloc");
exit(1);
}
scanf("%d",&(tmp->round)); /*输入此就绪队列中给每个进程所分配的CPU时间片*/
tmp ->prio = 50 - tmp->round; /*设置其优先级,时间片越高,其优先级越低*/
tmp ->LinkPCB = NULL; /*初始化其连接的进程队列为空*/
tmp ->next = NULL;
InsertPrio(tmp); /*按照优先级从高到低,建立多个就绪队列*/
}
}
void GetFirst(ReadyQueue *queue) /*取得某一个就绪队列中的队头进程*/
{
run = queue ->LinkPCB;
if(queue ->LinkPCB != NULL)
{
run ->state = 'R';
queue ->LinkPCB = queue ->LinkPCB ->next;
run ->next = NULL;
}
}
void InsertLast(PCB *in,ReadyQueue *queue) /*将进程插入到就绪队列尾部*/
{
PCB *fst;
fst = queue->LinkPCB;
if( queue->LinkPCB == NULL)
{
in->next = queue->LinkPCB;
queue->LinkPCB = in;
}
else
{
while(fst->next != NULL)
{
fst = fst->next;
}
in ->next = fst ->next;
fst ->next = in;
}
}
void ProcessCreate() /*进程创建函数*/
{
PCB *tmp;
int i;
printf("输入进程的个数: ");
scanf("%d",&num);
printf("输入进程名字和进程所需时间: ");
for(i = 0;i < num; i++)
{
if((tmp = (PCB *)malloc(sizeof(PCB)))==NULL)
{
perror("malloc");
exit(1);
}
scanf("%s",tmp->name);
getchar(); /*吸收回车符号*/
scanf("%d",&(tmp->needtime));
tmp ->cputime = 0;
tmp ->state ='W';
tmp ->prio = 50 - tmp->needtime; /*设置其优先级,需要的时间越多,优先级越低*/
tmp ->round = Head ->round;
tmp ->count = 0;
InsertLast(tmp,Head); /*按照优先级从高到低,插入到就绪队列*/
}
}
void RoundRun(ReadyQueue *timechip) /*时间片轮转调度算法*/
{
int flag = 1;
GetFirst(timechip);
while(run != NULL)
{
while(flag)
{
run->count++;
run->cputime++;
run->needtime--;
if(run->needtime == 0) /*进程执行完毕*/
{
run ->state = 'F';
InsertFinish(run);
flag = 0;
}
else if(run->count == timechip ->round)/*时间片用完*/
{
run->state = 'W';
run->count = 0; /*计数器清零,为下次做准备*/
InsertLast(run,timechip);
flag = 0;
}
}
flag = 1;
GetFirst(timechip);
}
}
void MultiDispatch() /*多级调度算法,每次执行一个时间片*/
{
int flag = 1;
int k = 0;
ReadyQueue *point;
point = Head;
GetFirst(point);
while(run != NULL)
{
Output();
if(Head ->LinkPCB!=NULL)
point = Head;
while(flag) {
run->count++;
run->cputime++;
run->needtime--;
if(run->needtime == 0) /*进程执行完毕*/
{
run ->state = 'F';
InsertFinish(run);
flag = 0;
}
else if(run->count == run->round)/*时间片用完*/
{
run->state = 'W';
run->count = 0; /*计数器清零,为下次做准备*/
if(point ->next!=NULL)
{
run ->round = point->next ->round;/*设置其时间片是下一个就绪队列的时间片*/
InsertLast(run,point->next); /*将进程插入到下一个就绪队列中*/
flag = 0;
}
else {
RoundRun(point); /*如果为最后一个就绪队列就调用时间片轮转算法*/
break;
}
}
++k;
if(k == 3) {
ProcessCreate();
}
}
flag = 1;
if(point ->LinkPCB == NULL)/*就绪队列指针下移*/
point =point->next;
if(point ->next ==NULL)
{
RoundRun(point);
break;
}
GetFirst(point);
}
}
五、算法流程图
六、运行与测试
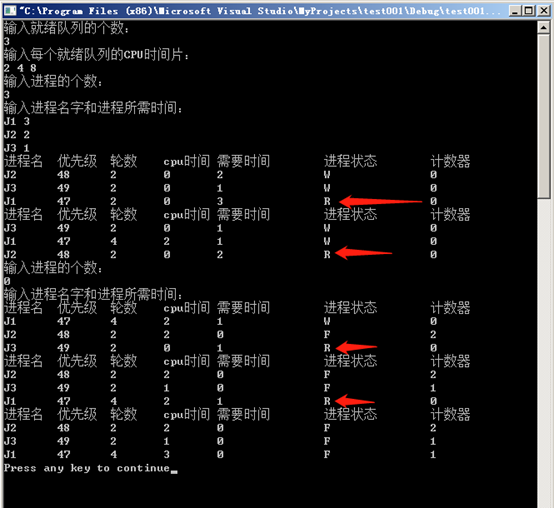
用例描述:
假设系统中有3个就绪队列Q1,Q2,Q3,时间片分别为2,4,8。
现在有3个作业J1,J2,J3它们所需要的CPU时间分别是3,2,1个时间片。
1、时刻0: J1到达。于是进入到队列1 , 运行1个时间片 , 时间片还未到,此时J2到达。
2、时刻1: J2到达。 由于时间片仍然由J1掌控,于是等待。 J1在运行了1个时间片后,已经完成了在Q1中的2个时间片的限制,于是J1置于Q2等待被调度。现在处理机分配给J2。
3、时刻2: J1进入Q2等待调度,J2获得CPU开始运行。
4、时刻3:J3到达,由于J2的时间片未到,故J3在Q1等待调度,J1也在Q2等待调度。
5、时刻4:J2处理完成,由于J3,J1都在等待调度,但是J3所在的队列比J1所在的队列的优先级要高,于是J3被调度,J1继续在Q2等待。
6、时刻5:J3经过1个时间片,完成。
7、时刻6:由于Q1已经空闲,于是开始调度Q2中的作业,则J1得到处理器开始运行。
8、时刻7:J1再经过一个时间片,完成了任务。于是整个调度过程结束。
运行截图:
七、总结
多级反馈队列调度算法体现了计算思维的调度特点,应用了先来先服务原则、应用时间片等做法使得每个申请者都能及时使用资源,是一种很好的协调整体的解决方案。