一、现象介绍
靠近输出层的hidden layer 梯度大,参数更新快,所以很快就会收敛;
而靠近输入层的hidden layer 梯度小,参数更新慢,几乎就和初始状态一样,随机分布。
这种现象就是梯度弥散(vanishing gradient problem)。
而在另一种情况中,前面layer的梯度通过训练变大,而后面layer的梯度指数级增大,这种现象又叫做梯度爆炸(exploding gradient problem)。
总的来说,就是在这个深度网络中,梯度相当不稳定(unstable)。
二、梯度消失与梯度爆炸原因
首先,来看神经网络更新梯度的原理,即反向传播算法。(反向传播算法请移步:https://www.cnblogs.com/CJT-blog/p/10419523.html)

通过反向传播算法更新梯度的公式可以看到,影响梯度更新的有,初始权重、激活函数、梯度流动方式、损失值过大等。
下面分别来一一进行介绍:
(1)初始权重带来的影响:神经网络权重初始化不当;
(2)激活函数带来的影响:激活函数选择不当;
(3)梯度流动方式带来的影响:网络结构本身的问题,如RNN;
(4)损失值过大带来的影响:数据集的问题,如标注不准等。
下面,就来对这几种情况分别进行一一介绍。
三、各类原因以及解决方法
1、神经网络权重初始化不当
深度神经网络训练的时候,采用反向传导的方式,其背后的本质是链式求导,计算每层梯度的时候会涉及到一些连乘操作。每一层的残差都由后一层的残差乘以两层之间的权重矩阵,再乘以当前层的激活函数的导数得到。因此,神经网络权重的初始化至关重要,不当的初始化可能会带来梯度消失或者梯度爆炸。
当网络过深,如果连乘的因子大部分小于1,最后乘积可能趋于0;另一方面,如果连乘的因子大部分大于1,最后乘积可能趋于无穷。这就是所谓的梯度消失与梯度爆炸。
防止因权重初始化不当带来的梯度爆炸:
(1) 使用Xavier初始化法或者MSRA初始化法,使得在深度网络的每一层,激活值都有很好的分布。
(2) 使用预训练模型,初始化已有网络层的权重。
2、激活函数选择不当
激活函数可移步:https://www.cnblogs.com/CJT-blog/p/10421822.html
sigmoid函数: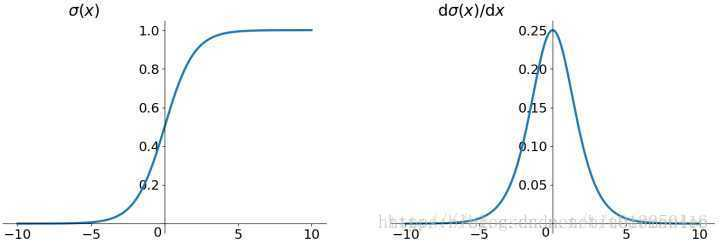
tanh函数: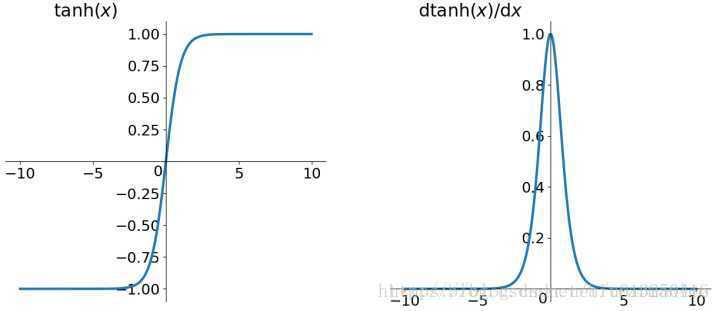
如果选择sigmoid 或者 tanh 函数,由它们的曲线可以看出,当输入很大或者很小的时候,饱和的神经元会带来梯度消失。
防止因激活函数选择不当带来的梯度消失:
1.最常使用Relu,需要小心地调节学习速率(如果relu参数初始化不理想,前向计算结果为负值,则进行梯度计算的时候全部变为0,在反向计算的时候也会没有响应);
2.偶尔可考虑Relu的变种,如Leaky Relu;
3.一般不使用sigmoid
3、神经网络本身的结构问题,如RNN

RNN相当于把许多循环神经网络单元连接成一个序列。可以设想梯度流穿过,当我们要计算关于h0的损失函数的梯度时,反向传播需要经过RNN中的每一个单元。每次反向传播经过一个单元时,都要使用其中某一个W的转置。
这意味着最终的表达式对h0梯度的表达式将会包含很多很多权重矩阵因子,这样不断对同一个值做乘法,是非常糟糕的。
在标量情况下,要么当这个值的绝对值大于1时,发生梯度爆炸;要么当这个值的绝对值小于1时,发生梯度消失,直到为0。既不发生梯度爆炸也不发生梯度消失,也就是当这个值正好为1。
对于矩阵而言,需要关注矩阵的最大奇异值,如果最大奇异值大于1,会发生梯度爆炸;如果最大奇异值小于1,会发生梯度消失。
防止因使用循环神经网络RNN带来的梯度消失与梯度爆炸问题:
1.设置梯度剪切阈值(gradient clipping threshold),一旦梯度超过该值,直接设置为该值;
2.使用沿时间的截断反向传导方法(详见[深度学习]循环神经网络:RNN,LSTM,GRU,Attention机制,沿时间的截断反向传导算法);
2.使用更加复杂的RNN结构,例如LSTM。
LSTM能尽量避免梯度爆炸或者梯度消失的原因有两个:
1.这里的遗忘门是矩阵元素相乘,而不是矩阵相乘。
2.矩阵元素相乘,可能会在不同的时间点乘以一个不同的遗忘门。
3.遗忘门是一个sigmoid函数,所以矩阵元素相乘的结果,会保证在(0,1)之间。
4.从最后的隐藏单元状态,反向传播到第一个单元状态,在反向传播的路径上,我们只通过一个单一的非线性tanh向后传播,而不是在每一个时间步长中单独设置tanh函数。
4、数据集本身问题
数据集本身可能标注不准确,引入大量噪声。以图片数据集为例,具体情况可能包括:
1.在目标检测中,四边形标注框与实际不匹配,标注框的面积过多大于实际目标的面积;
2.在使用mask rcnn检测目标时,只用四点标注的bounding boxes来生成mask,可能会导致生成的mask不够准确。如果偏差过大,也会引入梯度爆炸;
3.在场景文字检测中,为了套用已有的检测水平方向物体的目标检测框架,将原有的任意四边形标注框转换为其水平方向的最小外接矩形,也会导致标注框的面积过多大于实际目标的面积;
4.在场景文字识别中,对于一张完整的图片,一般是根据坐标对单词区域进行裁剪,再将所有的单词区域缩放成相同的大小。一是单词区域裁剪不准确,二是如果缩放尺寸没有选择好,较小的图片放大成过大的尺寸,会使得训练图片非常模糊,引入大量噪声。
对于数据集本身的问题,带来的梯度爆炸问题,一般需要注意,尽量使得标注准确,除非是进行难样本挖掘操作,一般尽量使用清晰的图片。
四、补充
1、如何确定是否出现梯度爆炸?
在训练过程中出现梯度爆炸会伴随一些细微的信号,如:
(1)模型无法从训练数据中获得更新;
(2)模型不稳定,导致更新过程中的损失出现显著变化;
(3)训练过程中,模型的损失变为Nan。
2、loss为Nan原因
1.梯度爆炸。梯度变得非常大,使得学习过程难以继续。
2.不当的损失函数。
3.不当的输入。
4.池化层中步长比卷积核的尺寸大。
3、针对梯度爆炸主要做法是:一般靠裁剪后的优化算法解决。比如gradient clipping(如果梯度的范数大于某个给定值,将梯度同比收缩)。
4、BN层防止梯度弥散
BN(Batch Normalization)层的作用
(1)加速收敛(2)控制过拟合,可以少用或不用Dropout和正则(3)降低网络对初始化权重不敏感(4)允许使用较大的学习率
在每一层输入的时候,加个BN预处理操作。BN应作用在非线性映射前,即对x=Wu+b做规范化。在BN中,是通过将activation规范为均值和方差一致的手段使得原本会减小的activation的scale变大。可以说是一种更有效的local response normalization方法。
BN层请移步:等一下。
转自:https://blog.csdn.net/u013250416/article/details/81410693
参考:https://www.cnblogs.com/callyblog/p/8098646.html
https://blog.csdn.net/manong_wxd/article/details/78735599
https://blog.csdn.net/u013403054/article/details/78424095