本文为学习笔记
参与:王博kings,Sophia
最近结束的CVPR 2020在推动物体检测方面做出了巨大贡献。在本文中,我们将介绍一些特别令人印象深刻的论文。
1、A Hierarchical Graph Network for 3D Object Detection on Point Clouds(用于点云3D目标检测的分层图网络)
HGNet包含三个主要组件:
- 基于GConv的U形网络(GU-net)
- 提案生成者
- 提案推理模块(ProRe Module)-使用完全连接的图对提案进行推理
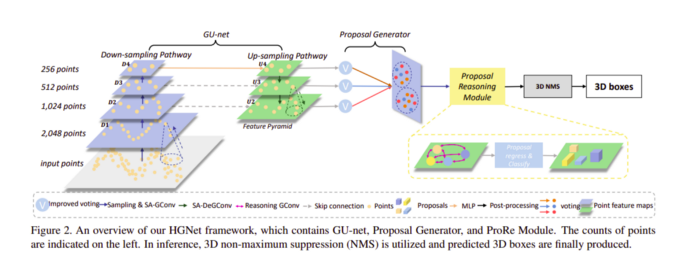
作者提出了一种注重形状的GConv(SA-GConv),以捕获局部形状特征。这是通过对相对几何位置进行建模以描述对象形状来完成的。

基于SA-GConv的U型网络可捕获多级功能。然后将它们通过投票模块映射到相同的特征空间,并用于生成建议。下一步,基于GConv的提案推理模块使用提案来预测边界框。
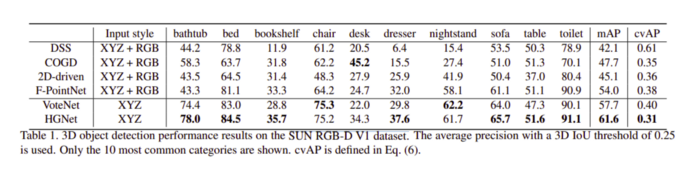
以下是在SUN RGB-D V1数据集上获得的一些性能结果。
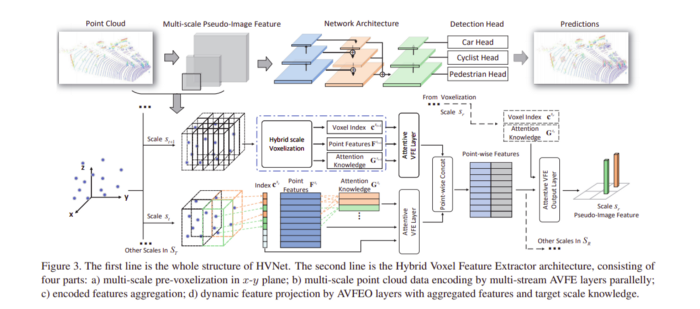
2、HVNet: Hybrid Voxel Network for LiDAR Based 3D Object Detection(HVNet:基于激光雷达的三维物体检测的混合体素网络)
在本文中,作者提出了混合体素网络(HVNet),这是一个用于基于点云的3D对象检测自动驾驶的一级网络。
本文中使用的体素特征编码(VFE)方法包含三个步骤:
- 体素化—将点云分配给2D体素网格
- 体素特征提取-计算与网格相关的逐点特征,该点特征被馈送到PointNet样式特征编码器
- 投影-将逐点特征聚合到体素级特征并将其投影到其原始网格。这形成伪图像特征图
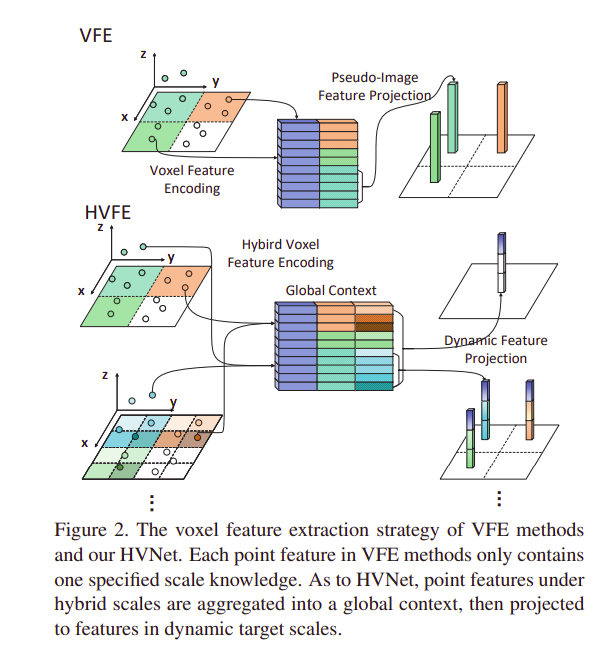
体素的大小在VFE方法中非常重要。较小的体素尺寸可以捕获更精细的几何特征。它们也更擅长对象本地化,但推理时间更长。使用较粗的体素可以获得更快的推理速度,因为这会导致较小的特征图。但是,它的性能较差。
作者提出了混合体素网络(HVNet),以实现细粒度体素功能的利用。它由三个步骤组成:
- 多尺度体素化-创建一组特征体素尺度并将它们分配给多个体素。
- 混合体素特征提取-计算每个比例的体素相关特征,并将其输入到关注特征编码器(AVFE)中。每个体素比例尺上的要素都是逐点连接的。
- 动态要素投影-通过创建一组多比例项目体素将要素投影回伪图像。
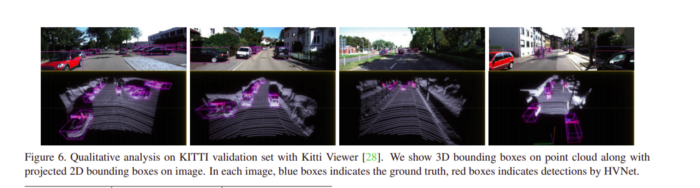
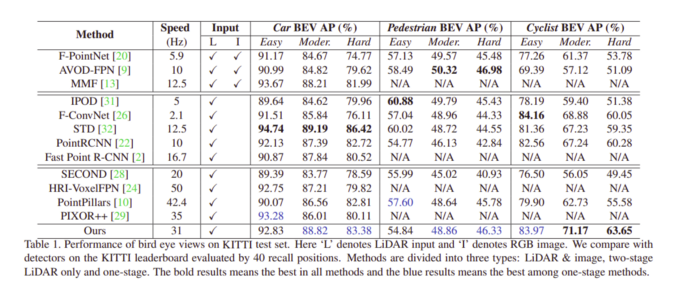
这是在KITTI数据集上获得的结果。
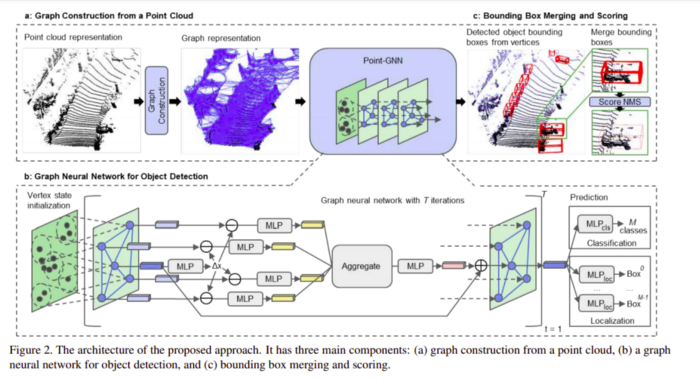
3、Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud(Point-GNN:用于点云中3D对象检测的图神经网络)
本文的作者提出了一种图神经网络-Point-GNN-从LiDAR点云中检测物体。网络预测图形中每个顶点所属的对象的类别和形状。Point-GNN具有自动回归机制,可以一次检测多个物体。
所提出的方法包括三个部分:
- 图形构建:体素降采样点云用于图形构建
- T迭代的图神经网络
- 边界框合并和评分
以下是在KITTI数据集上获得的结果:
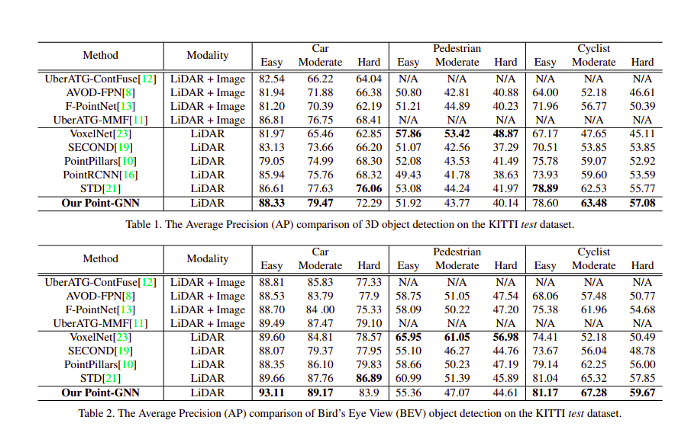
代码:https://github.com/WeijingShi/Point-GNN
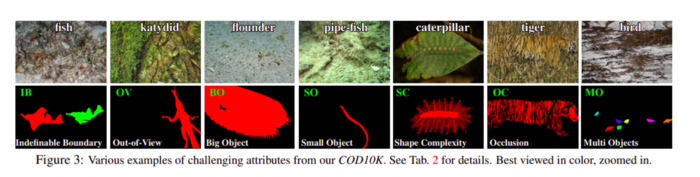
4、Camouflaged Object Detection
本文解决了检测嵌入在其周围环境中的物体的挑战-伪装物体检测(COD)。作者还介绍了一个名为COD10K的新数据集。它包含10,000张图像,覆盖许多自然场景中的伪装物体。它具有78个对象类别。图像带有类别标签,边界框,实例级别和消光级别的标签注释。

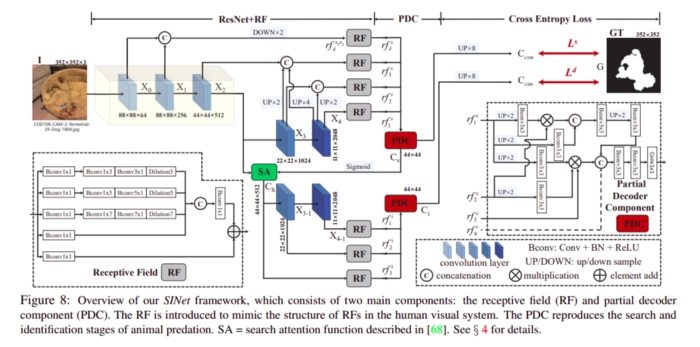
作者开发了一种称为搜索标识网络(SINet)的COD框架。该代码在这里可用:
https://github.com/DengPingFan/SINet/
网络有两个主要模块:
- 搜索模块(SM),用于搜索伪装的物体
- 用于检测物体的识别模块(IM)
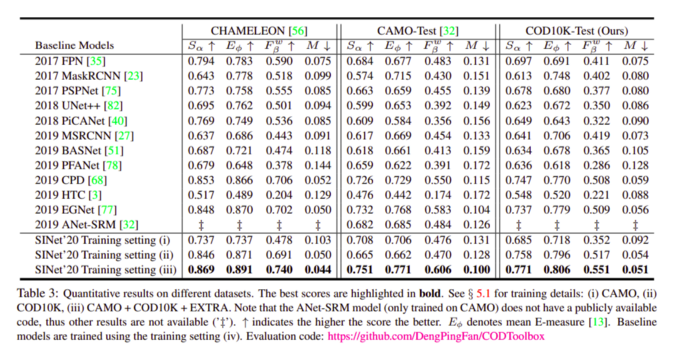
以下是在各种数据集上获得的结果:
5、Few-Shot Object Detection with Attention-RPN and Multi-Relation Detector
本文提出了一个短时目标检测网络,该网络的目标是检测不可见类别的目标,并带有一些注释示例。
他们的方法包括注意RPN,多重关系检测器和对比训练策略。该方法利用少拍支持集和查询集之间的相似性来标识新对象,同时还减少了错误标识。作者还贡献了一个新的数据集,其中包含1000个类别,这些类别的对象具有高质量的注释。https://github.com/fanq15/Few-Shot-Object-Detection-Dataset
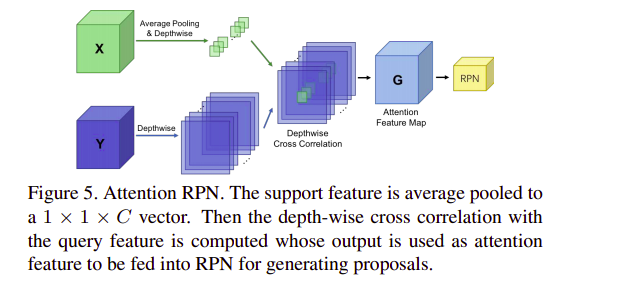
该网络体系结构由一个权重共享框架组成,该框架具有多个分支-一个分支是查询集,其余分支用于支持集。权重共享框架的查询分支是Faster R-CNN网络。
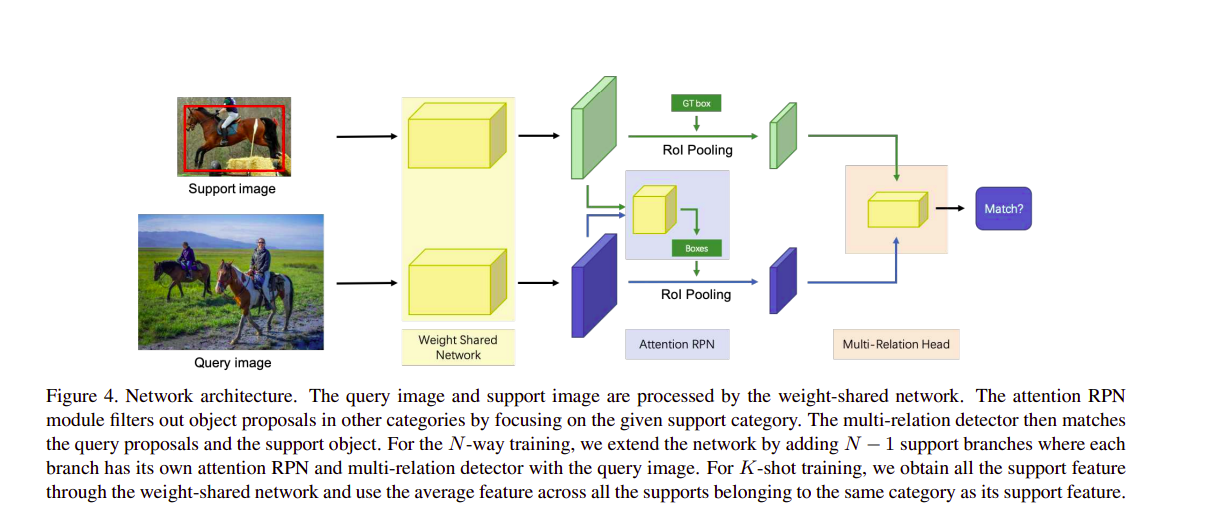
作者介绍了带有多关系模块的注意力RPN和检测器,以在支持和查询中的潜在框之间产生准确的解析。
以下是在ImageNet数据集上获得的一些结果。
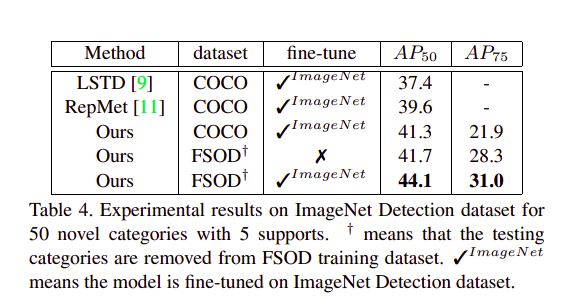
以下是在许多数据集上获得的一些观察结果。

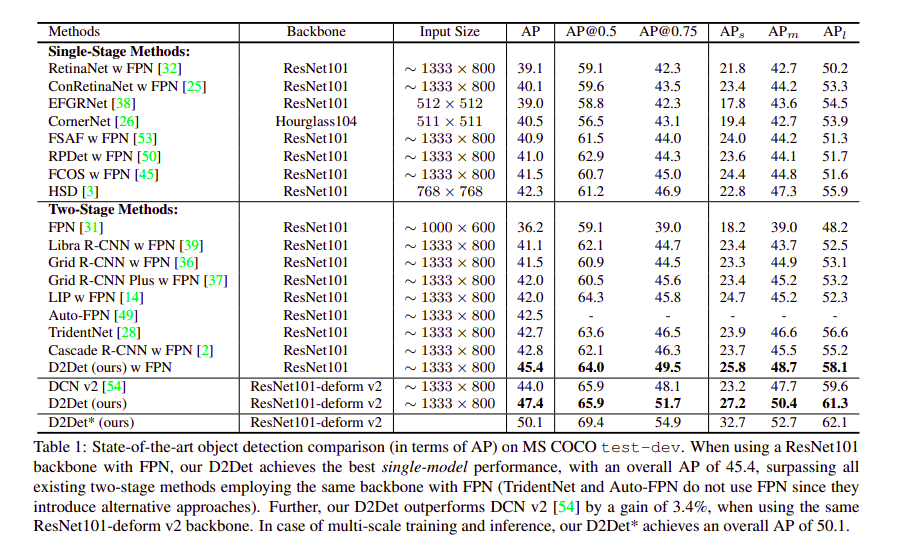
6、D2Det: Towards High-Quality Object Detection and Instance Segmentation
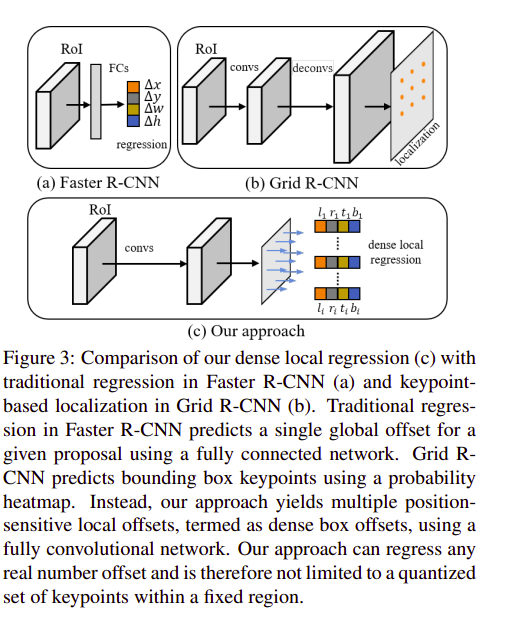
本文的作者提出了D2Det,一种解决精确定位和精确分类的方法。他们引入了密集局部回归,可以预测对象提案的多个密集框偏移。这使他们能够实现精确的定位。
作者还介绍了区分RoI池方案,以实现准确的分类。合并方案从提案的几个子区域进行采样,并执行自适应加权以获得区别特征。
该代码位于:https://github.com/JialeCao001/D2Det
该方法基于标准的Faster R-CNN框架。在这种方法中,Faster R-CNN的传统盒偏移回归被提议的密集局部回归所替代。在该方法中,通过判别式RoI池增强了分类。
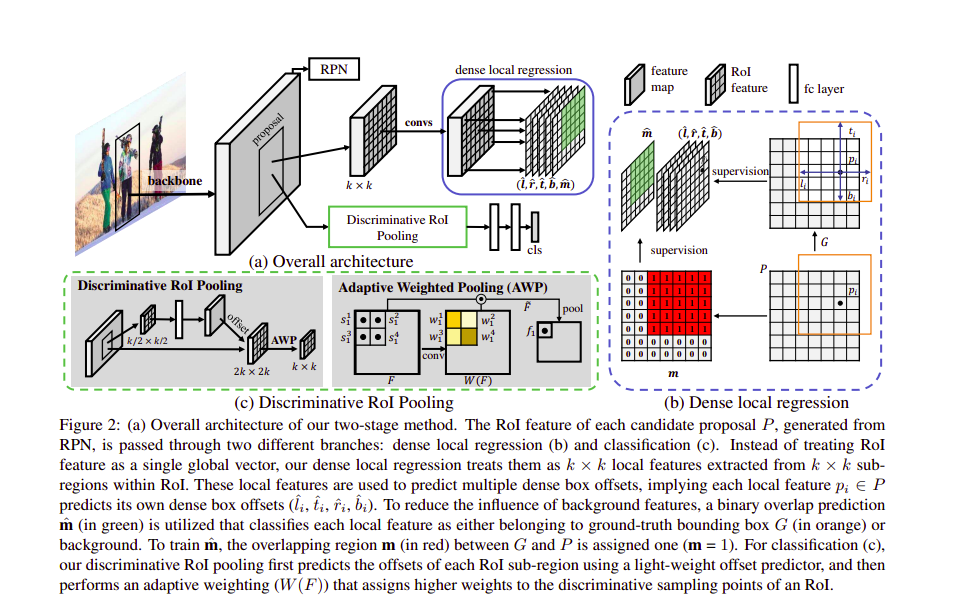
在两阶段方法中,第一阶段使用区域提议网络(RPN),第二阶段使用单独的分类和回归分支。分类分支基于判别池。局部回归分支的目标是对象的精确定位。
以下是在MS COCO数据集上获得的结果:
链接:https://heartbeat.fritz.ai/cvpr-2020-the-top-object-detection-papers-f920a6e41233
编辑:Sophia | 王博(Kings)笔记
计算机视觉联盟 报道 | 公众号 CVLianMeng