for basic discriminator of GANs
判别器用于感知生成器产生的合成图片和ground-truth的差异,并旨在实现区分出fake or real;
同时,判别器的输出也是经过一系列的conv后得到的一个标量值,一般使这个值激活在0~1之间;
但是,这样的结果存在着一些问题:
1.输出的结果显然是一个整体图片的加权值,无法体现局部图像的特征,对于精度要求高的的图像迁移等任务比较困难。
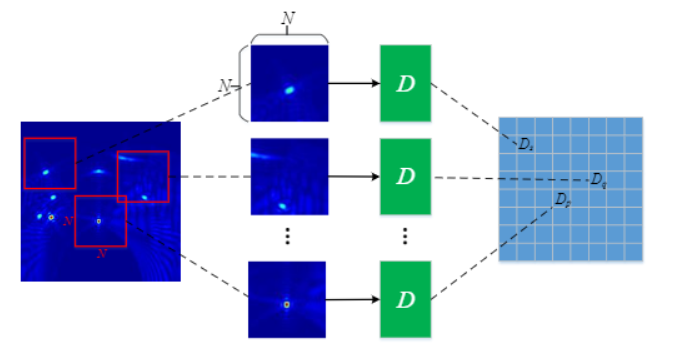
for Patch-based discriminator of GANs
PatchGAN的思路是最后的输出不是一个标量值,而是一个$N*N$的矩阵$X$,其实$X_{ij}$表示patch $ij$是fake or real.
关键点就是:在$X$上的一个神经元$X_{ij}$可以表示一块输入patch,这个神经元就对这块patch的像素敏感,这块patch 就是 输出$X_{ij}$的感知域(receptive field).
1.这样方法 通过每个patch 进行差别的判别, 实现了局部图像特征的提取和表征, 有利于实现更为高分辨率的图像生产;同时, 对最后的 分类特征图进行平均后, 也能够实现相比
2.单标量输出的更为精确的整体差异表示,相当于对整体进行加权求和平均,对于某些特征差异大的局部图像特征, 能够实现比basic D 更为合理的 损失表示。
3.这种机制,将局部图像特征和整体图像特性相融合。
Mathematical:
有个解决办法就是将图像裁剪成多个重叠的patches,分别进行判别器的差异识别,并对得到的结果进行平均,但是这样存在大的运算消耗。
Obviously,卷积神经网络的强大之处在于,它们能以相同的方式独立地处理每个图像块,所以在最后的实际过程中,得到的输出矩阵的每一神经元相当于就是在执行每个patch的单独判断的结果,这样的结果具有高效的运算效果。
The size of receptive field:
堆叠不同层的convnets, 最后输出矩阵的单个神经元的表征的感知域的大小显然不一样;感知域越大,这意味着它应该学习距离更远的对象之间的关系
empirical, 层数越深, 能够感知的patch的尺寸也越大,但是这样会付出更多的计算成本和时间消耗,所以需要通过traceback:
function receptive_field_sizes()
% compute input size from a given output size
f = @(output_size, ksize, stride) (output_size - 1) * stride + ksize;
%% n=1 discriminator
% fix the output size to 1 and derive the receptive field in the input
out = ...
f(f(f(1, 4, 1), ... % conv2 -> conv3
4, 1), ... % conv1 -> conv2
4, 2); % input -> conv1
fprintf('n=1 discriminator receptive field size: %d
', out);
%% n=2 discriminator
% fix the output size to 1 and derive the receptive field in the input
out = ...
f(f(f(f(1, 4, 1), ... % conv3 -> conv4
4, 1), ... % conv2 -> conv3
4, 2), ... % conv1 -> conv2
4, 2); % input -> conv1
fprintf('n=2 discriminator receptive field size: %d
', out);
%% n=3 discriminator
% fix the output size to 1 and derive the receptive field in the input
out = ...
f(f(f(f(f(1, 4, 1), ... % conv4 -> conv5
4, 1), ... % conv3 -> conv4
4, 2), ... % conv2 -> conv3
4, 2), ... % conv1 -> conv2
4, 2); % input -> conv1
fprintf('n=3 discriminator receptive field size: %d
', out);
%% n=4 discriminator
% fix the output size to 1 and derive the receptive field in the input
out = ...
f(f(f(f(f(f(1, 4, 1), ... % conv5 -> conv6
4, 1), ... % conv4 -> conv5
4, 2), ... % conv3 -> conv4
4, 2), ... % conv2 -> conv3
4, 2), ... % conv1 -> conv2
4, 2); % input -> conv1
fprintf('n=4 discriminator receptive field size: %d
', out);
%% n=5 discriminator
% fix the output size to 1 and derive the receptive field in the input
out = ...
f(f(f(f(f(f(f(1, 4, 1), ... % conv6 -> conv7
4, 1), ... % conv5 -> conv6
4, 2), ... % conv4 -> conv5
4, 2), ... % conv3 -> conv4
4, 2), ... % conv2 -> conv3
4, 2), ... % conv1 -> conv2
4, 2); % input -> conv1
fprintf('n=5 discriminator receptive field size: %d
', out);
实际模型搭建
显然,是需要堆积多个convnets即可实现PatchGAN的判别器, PatchGAN更多的将它理解为一种机制mechanism,其实整个模型就是一个FCN结构。
对于不同的感知域,肯定在D中表征为有不同的convnet层, torch:
function defineD_n_layers(input_nc, output_nc, ndf, n_layers) if n_layers==0 then return defineD_pixelGAN(input_nc, output_nc, ndf) else local netD = nn.Sequential() -- input is (nc) x 256 x 256 netD:add(nn.SpatialConvolution(input_nc+output_nc, ndf, 4, 4, 2, 2, 1, 1)) module = nn.SpatialConvolution(nInputPlane, nOutputPlane, kW, kH, [dW], [dH], [padW], [padH]) netD:add(nn.LeakyReLU(0.2, true)) local nf_mult = 1 local nf_mult_prev = 1 for n = 1, n_layers-1 do nf_mult_prev = nf_mult nf_mult = math.min(2^n,8) netD:add(nn.SpatialConvolution(ndf * nf_mult_prev, ndf * nf_mult, 4, 4, 2, 2, 1, 1)) netD:add(nn.SpatialBatchNormalization(ndf * nf_mult)):add(nn.LeakyReLU(0.2, true)) end -- state size: (ndf*M) x N x N nf_mult_prev = nf_mult nf_mult = math.min(2^n_layers,8) netD:add(nn.SpatialConvolution(ndf * nf_mult_prev, ndf * nf_mult, 4, 4, 1, 1, 1, 1)) netD:add(nn.SpatialBatchNormalization(ndf * nf_mult)):add(nn.LeakyReLU(0.2, true)) -- state size: (ndf*M*2) x (N-1) x (N-1) netD:add(nn.SpatialConvolution(ndf * nf_mult, 1, 4, 4, 1, 1, 1, 1)) -- state size: 1 x (N-2) x (N-2) netD:add(nn.Sigmoid()) -- state size: 1 x (N-2) x (N-2) return netD end end9
一些思考 future works
1.PatchGAN的整个机制的核心在于对 G网络结果的优化,优化了类似U-net的结构(encoder-decoder的架构),使得低阶信息跨越bottleneck,让更多的低阶信息得以交换,
并让G的训练有如同 Res-block般的平缓梯度,一定程度上减缓了梯度消失, 我们知道Resnet较为好的解决了多层convnet堆叠后的训练困难的问题,其类似于放大器的结构,让训练
更为的有效。
2.由于patches的重叠性和局部特征性,对于不同的任务, patches之间的局部特征的相关性肯定存在差异, 所以对于感知域的尺寸确定需要有差异性和动态性,才能实现较为好的性能。
3.对于G 来说, 其解码过程其实使用的是微步幅卷积操作或叫做反卷积操作,但是反卷积操作其实对于图像的产生是存在着争议性的,改善和提高这个部分,具有一点的前景, 可以采用
多个的feature map进行重叠作为输入的操作, 得到一个多层特征图, 尝试直接使用一个下采样卷积作为一个生成器。
4.对于CGANs 机制的引入, 其实是使得 GAN的训练更加稳定, 进行有约束的执行generative 任务, 进行加 buff的 判别的任务。