单目相机模型
相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程
1.1 针孔相机模型
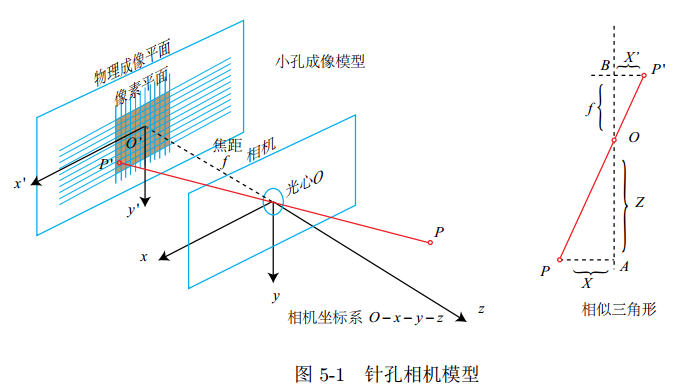
几种坐标系
- 世界坐标系Pw, 单位是m
- 相机坐标系Pc, 单位是m
- 像素坐标系Puv, 单位是像素
相机坐标系的原点为相机的光心, x轴指向右方, y轴指向下方,z轴指向前方。
像素坐标系的原点为图像的左上角,u轴指向右方, y轴指向下方。
注:opencv中的图像坐标系和这个像素坐标系是一样的。
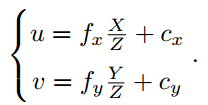
- 相机坐标系与像素坐标系的转换:
- 针孔相机的观测方程:
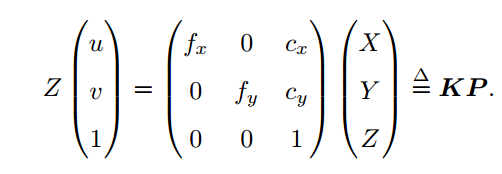
注: 内参数矩阵( Camera Intrinsics) K
- 世界坐标系与像素坐标系的转换
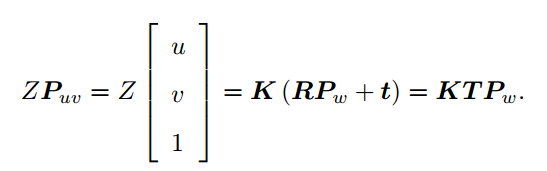
注:其中包含了齐次坐标到非齐次坐标的转换
1.2 畸变模型
由透镜形状引起的畸变称之为径向畸变,分为两大类, 桶形畸变和枕形畸变

- 径向畸变函数矫正公式:

- 切向畸变函数矫正公式:
整理可得:

1.3 单目相机成像过程
- 1. 首先,世界坐标系下有一个固定的点 P,世界坐标为 Pw;
- 2. 由于相机在运动,它的运动由 R; t 或变换矩阵 T 2 SE(3) 描述。 P 的相机坐标为:Pc= RPw + t。
- 3. 这时的 Pc 仍有 X; Y; Z 三个量,把它们投影到归一化平面 Z = 1 上,得到 P 的归一化相机坐标: Pc = [X/Z; Y /Z;1]T。
- 4. 最后, P 的归一化坐标经过内参后,对应到它的像素坐标: Puv = KPc。
世界坐标系->相机坐标系->归一化处理-> 像素坐标系