由世界坐标系转换到像素坐标系的运算
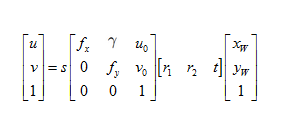
其中,u、v表示像素坐标系中的坐标,s表示尺度因子,fx、fy、u0、v0、γ(由于制造误差产生的两个坐标轴偏斜参数,通常很小)表示5个相机内参,R,t表示相机外参,Xw、Yw、Zw(假设标定棋盘位于世界坐标系中Zw=0的平面)表示世界坐标系中的坐标。
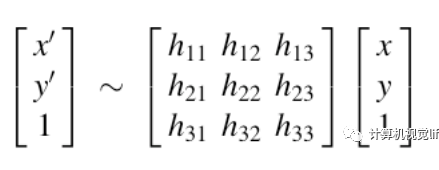
其中从世界坐标系转换到像素坐标系可以称之为是单应性变换。首先学习单应性变换的推导过程,假设在齐次坐标系上,有点 [x, y, 1] 和 变换后的点 [x', y', 1]
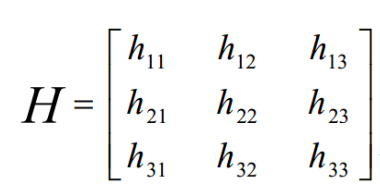
单应性矩阵H定义为:
则有矩阵相乘:
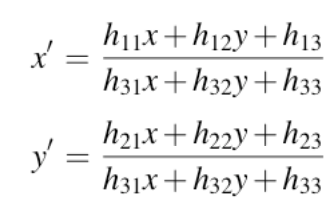
展开:
想求解矩阵,首先看其自由度,确定解的range,因为使用齐次坐标系,可以对其进行任意大小的缩放: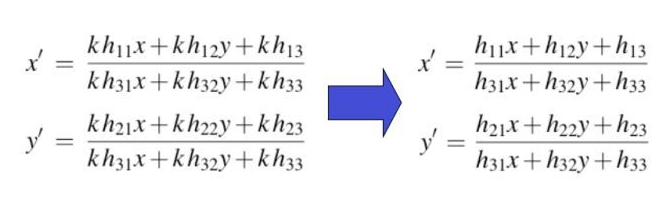
所以其free variable 是8
可以将其表示为如下的形式:让其模为1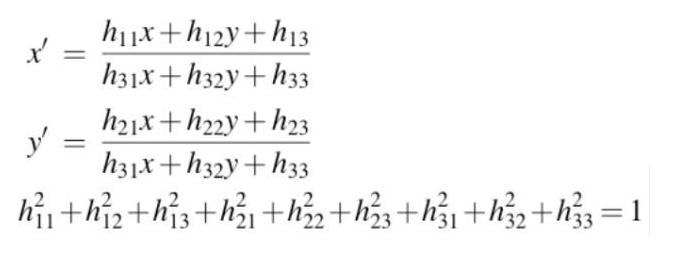
展开整理:
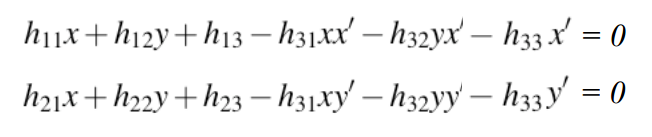
一对对应的点可以展开成:
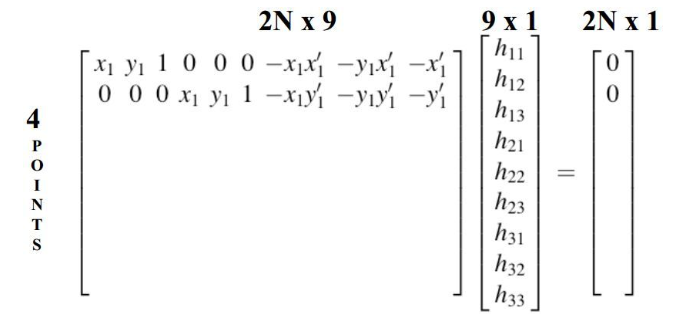
因此我们需要四组对应的点,才能求解,但是真实情况下,给出的点组是会有像素偏差的,所以在真实应用场景,会提供更多组的点来求出最优解
在opencv中有现成的函数可以调用 cv::findHomography(...) => cv::Mat
求出单应性矩阵H后,要想办法将其拆分为相机的内参,外参矩阵