一、SPI是一种常用的串行通信接口,与UART不同的地方在于。SPI可以同时挂多个从机,但是UART只能点对点的传输数据,此外SPI有四条线实现数据的传输,而UART采用的是2条实现串行数据的传输
1.SPI的主从机的接口模型
(master和slave在时钟的上升沿采样,下降沿发送数据。数据从最高位(MSB)开始发送。)
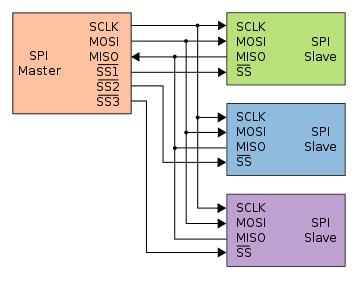
用3条通讯总线和1条片选线。
- MOSI:Master Output Slave Input,顾名思义,即主设备输出/从设备输入。数据从主机输出到从机,主机发送数据。
- MISO:Master Iutput Slave Onput,主设备输入/从设备输出,数据由从机输出到主机,主机接收数据。
- SCK:即时钟信号线,用于通讯同步。该信号由主机产生,其支持的最高通讯速率为fpclk/2,即所挂载总线速率的一半。如SPI2挂载在APB1总线上,则其最高速率为36MHz / 2 = 18MHz。类似木桶效应,两个设备之间通讯时,通讯速率受限于较低速的设备。
- NSS:即片选信号线,用于选择通讯的从设备,也可用CS表示。每个从设备都有一条独立的NSS信号线,主机通过将某个设备的NSS线置低电平来选择与之通讯的从设备。所以SPI通讯以NSS线电平置低为起始信号,以NSS线电平被拉高为停止信号。
2.SPI如何使用,以及对应的有几种配置模式(相位、极性)
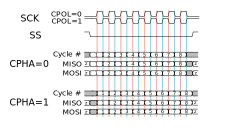
SPI配置模式分类根据的是时钟信号空闲状态。、以及上升沿采样还是下降沿采样,
CPOL=0表示的是时钟空闲的时候为低电平,反之是高电平
CPHA=0表示的是时钟信号的第一个边沿是采样沿
CPHA=1表示的是时钟信号的第二个边沿是采样沿
对应的时序图如下:

CPOL、CPHA
- CPOL:即在没有数据传输时,时钟的空闲状态的电平。
- CPHA:即数据的采样时刻。
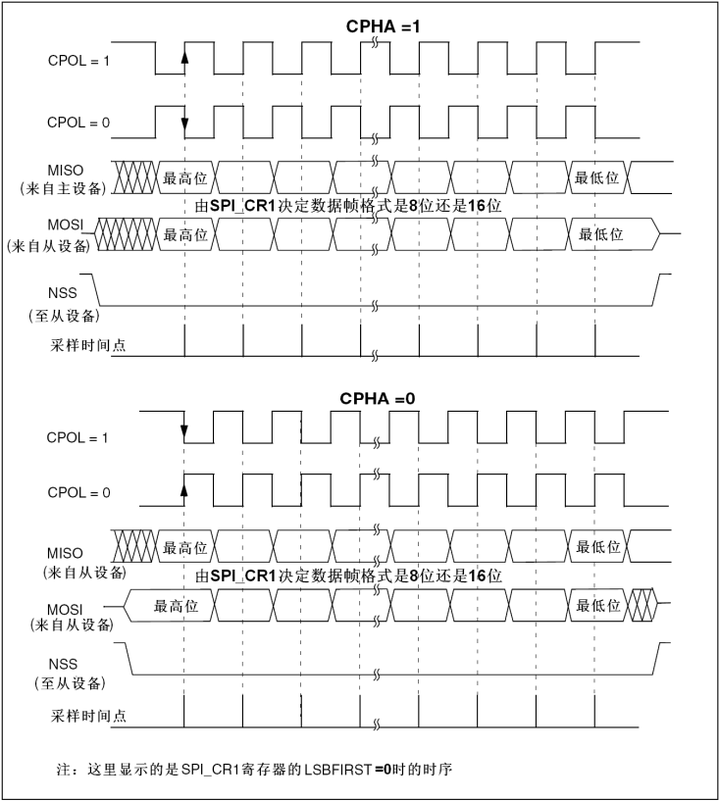
有一点需要注意的是,主机和从机需要工作在相同的模式下才能正常通讯。
3.起始、停止信号(转于知乎)
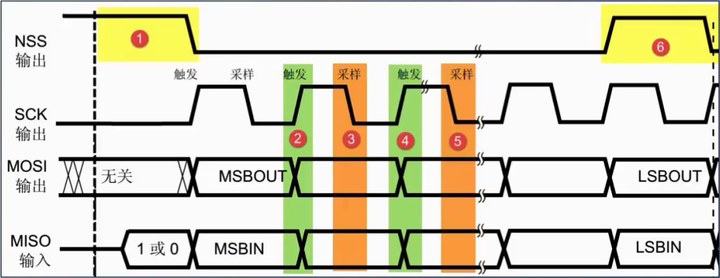
如上图,编号1和6即为起始和停止信号的发生区域。NSS电平由高变低,则产生起始信号;NSS电平由低变高,则产生停止信号。从机检测到自己的NSS线电平被置低,则开始与主机进行通讯;反之,检测到NSS电平被拉高,则停止通讯。
4.数据有效性
MOSI和MISO线在SCK的每个时钟周期传输一位数据,开发者可以自行设置MSB或LSB先行,不过需要保证两个通讯设备都使用同样的协定。从图16-1看到,在SCK的上升沿和下降沿时进行触发和采样。
SPI有四种通讯模式,在SCK上升沿触发,下降沿采样只是其中一种模式。四种模式的主要区别便是总线空闲时SCK的状态及数据采样时刻。这涉及到“时钟极性CPOL”和“时钟相位CPHA”,由CPOL和CPHA的组合而产生了四种的通讯模式。
5.SPI的verilog实现:结合实际的应用场景对该通信协议进行分析:在一个网络通信模型中,可以将基带部分作为主控,RF部分作为受控部分,把SPI接口作两者之间传输数据的接口,它完成的主要工作是
(1)将从base band接收到的16位的并行数据,转换为RF所能接收的串行数据,并将该数据根据SPI协议送给RF。
(2)产生RF所需的时钟信号SCLK,使能信号CSB。
(3)接收从RF传回的串行数据,并将其转换为并行数据。
(4)将base band发送的数据,与RF返回的数据进行比较,并把比较结果传给base band。


module Serial2Parallel_Master #( parameter SCLK_DIVIDER = 8'd0 //Sclk Freq = Clk/2 / (SCLK_DIVIDER + 1) )( input rst_n, input clk, input sDataRd, input [15:0] pDataWr, output dataCS, output dataSclk, output sDataWr, output [15:0] pDataRd ); // counter,used to generate dataSclk signal reg dataCS_reg; reg dataSclk_reg; reg[7:0] Count1; always @(posedge clk or negedge rst_n) if(!rst_n) Count1 <= 8'd0; else if(Count1 == SCLK_DIVIDER) Count1 <= 8'd0; else Count1 <= Count1 + 1'b1; // generate CS and Sclk sequence reg [5:0] i;//Step number always @(posedge clk or negedge rst_n) if(!rst_n)begin i <= 6'd0; dataSclk_reg <= 1'b1;//Sclk high at reset dataCS_reg <= 1'b1; //CS high at reset end else begin case(i) //pull down CS at the beginning 6'd0: if(Count1 == SCLK_DIVIDER) begin i <= i + 1'b1; dataSclk_reg <= 1'b1; dataCS_reg <= 1'b0; end else; //generate 1st to 17th Sclk falling edge 6'd1,6'd3,6'd5,6'd7,6'd9,6'd11,6'd13,6'd15,6'd17,6'd19,6'd21,6'd23,6'd25,5'd27,6'd29,6'd31,6'd33: if(Count1 == SCLK_DIVIDER) begin dataSclk_reg <= 1'b0; dataCS_reg <= 1'b0; i <= i + 1'b1; end else; //generate 1st to 16th Sclk rising edge 6'd2,6'd4,6'd6,6'd8,6'd10,6'd12,6'd14,6'd16,6'd18,6'd20,6'd22,6'd24,6'd26,6'd28,6'd30,6'd32: if(Count1 == SCLK_DIVIDER) begin dataSclk_reg <= 1'b1; dataCS_reg <= 1'b0; i <= i + 1'b1; end else; 6'd34://CS and Sclk go high if(Count1 == SCLK_DIVIDER) begin dataSclk_reg <= 1'b1; dataCS_reg <= 1'b1; i <= i + 1'b1; end else; 6'd35://CS keep high, Sclk go low if(Count1 == SCLK_DIVIDER) begin dataSclk_reg <= 1'b0; dataCS_reg <= 1'b1; i <= 6'd0; end else ; default ; endcase end ; // - receive and send SPI data reg sDataWr_reg; reg [15:0] pDataRd_reg; reg rxDone_reg; reg [5:0] j; always @(negedge dataSclk or negedge rst_n) if(!rst_n) begin j <= 6'd0; sDataWr_reg <= 1'b0; pDataRd_reg <= 16'd0; rxDone_reg <= 1'b0; end // - CS high,clear j & AD data else if(dataCS) begin j <= 6'd0; sDataWr_reg <= 1'b0; pDataRd_reg <= 16'd0; rxDone_reg <= 1'b0; end else begin // - first falling of Sclk, send MSB of send data if(j == 6'd0) begin j <= j + 1'b1; sDataWr_reg <= pDataWr[15];//send data pDataRd_reg <= 16'd0;//receive data clear rxDone_reg <= 1'b0; end // - 2nd to 16th falling of Sclk else if(j <= 6'd15) begin j <= j + 1'b1; sDataWr_reg <= pDataWr[15-j];//send data pDataRd_reg[16-j] <= sDataRd;//receive data rxDone_reg <= 1'b0; end // - at 17th falling of sclk_fbk, CS is still low, receive LSB of receive data else if(j == 6'd16) begin j <= j + 1'b1; sDataWr_reg <= 1'b0;//send data clear pDataRd_reg[0] <= sDataRd;//receive data rxDone_reg <= 1'b1;//receive done end else begin j <= j; sDataWr_reg <= sDataWr_reg; pDataRd_reg <= pDataRd_reg; rxDone_reg <= rxDone_reg; end end // - data latch for pDataRd reg [15:0] pDataRd_l; always @(posedge clk or negedge rst_n) if(!rst_n) pDataRd_l <= 16'd0; else if(rxDone_reg) begin pDataRd_l <= pDataRd_reg; end else begin pDataRd_l <= pDataRd_l; end // - delay sDataWr for 1 main clk(10ns) reg sDataWr_dly; always @(posedge clk or negedge rst_n) if(!rst_n) sDataWr_dly <= 1'b0; else if(sDataWr_reg) begin sDataWr_dly <= 1'b1; end else begin sDataWr_dly <= 1'b0; end // - output assignment assign dataCS = dataCS_reg; assign dataSclk = dataSclk_reg; assign sDataWr = sDataWr_dly; assign pDataRd = pDataRd_l; endmodule
module Serial2Parallel_Slave ( input rst_n, input clk, input dataCS, input dataSclk, input sDataRd, input [15:0] pDataWr, output sDataWr, output [15:0] pDataRd ); // - SPI read and write reg sDataWr_reg; reg [15:0] pDataRd_reg; reg rxDone_reg; reg [5:0] j;//operation steps always @(negedge dataSclk or negedge rst_n) if(!rst_n) begin j <= 6'd0; sDataWr_reg <= 1'b0; pDataRd_reg <= 16'd0; rxDone_reg <= 1'b0; end // - CS high,clear j & AD data else if(dataCS) begin j <= 6'd0; sDataWr_reg <= 1'b0; pDataRd_reg <= 16'd0; rxDone_reg <= 1'b0; end else begin // - first falling of Sclk, send MSB of send data if(j == 6'd0) begin j <= j + 1'b1; sDataWr_reg <= pDataWr[15];//send data pDataRd_reg <= 16'd0;//receive data clear rxDone_reg <= 1'b0; end // - 2nd to 16th falling of Sclk else if(j <= 6'd15) begin j <= j + 1'b1; sDataWr_reg <= pDataWr[15-j];//send data pDataRd_reg[16-j] <= sDataRd;//receive data rxDone_reg <= 1'b0; end // - at 17th falling of sclk_fbk, CS is still low, receive LSB of receive data else if(j == 6'd16) begin j <= j + 1'b1; sDataWr_reg <= 1'b0;//send data clear pDataRd_reg[0] <= sDataRd;//receive data rxDone_reg <= 1'b1;//receive done end else begin j <= j; sDataWr_reg <= sDataWr_reg; pDataRd_reg <= pDataRd_reg; rxDone_reg <= rxDone_reg; end end // - data latch for pDataRd reg [15:0] pDataRd_l; always @(posedge dataCS or negedge rst_n) if(!rst_n) pDataRd_l <= 16'd0; else if(rxDone_reg) begin pDataRd_l <= pDataRd_reg; end else begin pDataRd_l <= pDataRd_l; end // - output assignment assign sDataWr = sDataWr_reg; assign pDataRd = pDataRd_l; endmodule
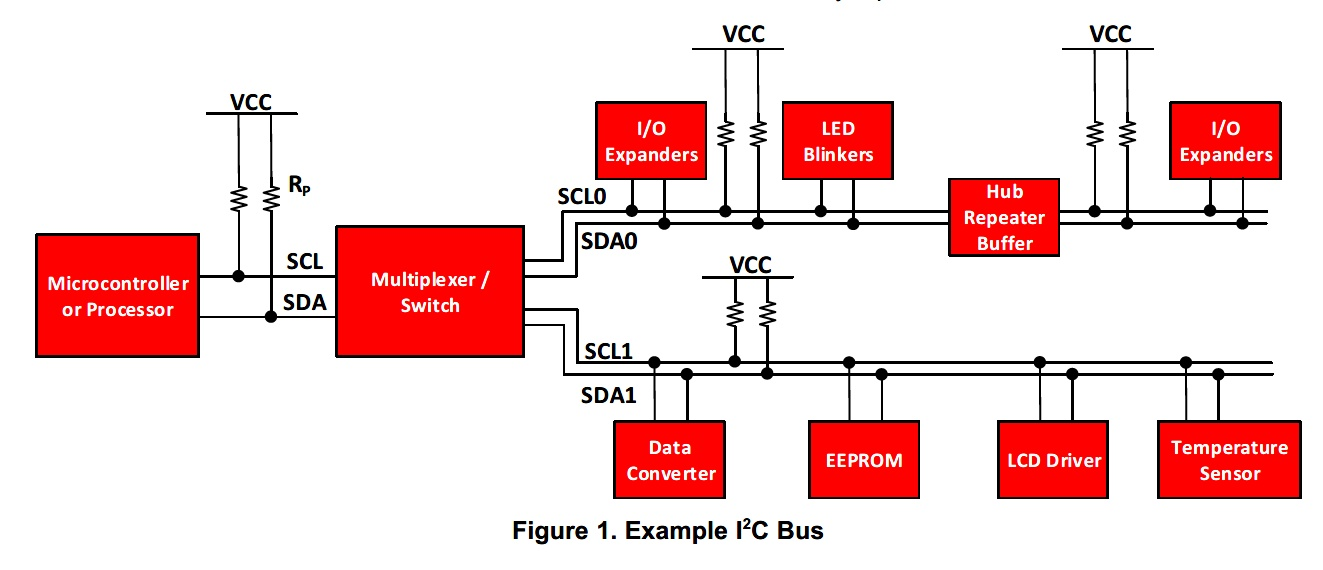
二、IIC通信
IIC的通信模式示意图:
IIC的verilog实现
`timescale 1ns / 1ps module IIC_AD( clk,rst_n, scl,sda); input clk; // 50MHz input rst_n; //��λ�źţ�����Ч output scl; // 24C02��ʱ�Ӷ˿� inout sda; // 24C02�����ݶ˿� reg[2:0] cnt; // cnt=0:scl上升沿,cnt=1:scl高电平中间,cnt=2:scl下降沿,cnt=3:scl低电平中间 reg[9:0] cnt_delay; //500循环计数,产生iic所需要的时钟 reg scl_r=1; //时钟脉冲寄存器 always @ (posedge clk or negedge rst_n) if(!rst_n) cnt_delay <= 9'd0; else if(cnt_delay == 9'd499) cnt_delay <= 9'd0; //计数到10us为scl的周期,即100KHz else cnt_delay <= cnt_delay+1'b1; always @ (posedge clk or negedge rst_n) begin if(!rst_n) cnt <= 3'd5; else begin case (cnt_delay) 9'd124: cnt <= 3'd1; //cnt=1:scl高电平中间,用于数据采样 9'd249: cnt <= 3'd2; //cnt=2:scl下降沿 9'd280: cnt <= 3'd3; //cnt=3:scl低电平中间,用于数据变化 9'd499: cnt <= 3'd0; //cnt=0:scl上升沿 default: cnt <= 3'd5; endcase end end `define SCL_POS (cnt==3'd0) `define SCL_HIG (cnt==3'd1) `define SCL_NEG (cnt==3'd2) `define SCL_LOW (cnt==3'd3) always @ (posedge clk or negedge rst_n) if(!rst_n) scl_r <= 1'b1; else if(cnt==3'd0) scl_r <= 1'b1; //scl上升沿 else if(cnt==3'd2) scl_r <= 1'b0; //scl下降沿 assign scl = scl_r; //产生iic所需要的时钟 //--------------------------------------------- reg[3:0] num; reg [7:0] db_r; //在IIC上传送的数据寄存器 reg sda_link; //输出数据sda信号inout方向控制 0z-c,1c-z reg sda_r=1; //输出数据寄存器 //需要写入24C02的地址和数据 parameter DEVICE_WRITE=8'b0101_1000;//被寻址器件地址(写操作) parameter BYTE_ADDR=8'b0000_0011;//写入/读出EEPROM的地址寄存器 parameter WRITE_DATA=8'b0001_1011;//写入EEPROM的数据 reg [3:0] cstate;//状态寄存器 parameter START = 4'd0;//状态机的进行步骤编号 parameter ADD1 = 4'd1; parameter ACK1 = 4'd2; parameter ADD2 = 4'd3; parameter ACK2 = 4'd4; parameter DATA = 4'd5; parameter ACK3 = 4'd6; parameter STOP1 = 4'd7; //--------------------------------------------- always @ (posedge clk or negedge rst_n) begin if(!rst_n) begin num <= 3'd0; sda_link <= 1'b1; sda_r <= 1'b1; cstate <= START; end else begin case (cstate) START: begin if(`SCL_HIG) begin //scl为高电平期间 sda_link <= 1'b1; //确定数据传输方向,数据线sda为output db_r <= DEVICE_WRITE; sda_r <= 1'b0; //拉低数据线sda,产生起始位信号 cstate <= ADD1; num <= 4'd0; //num计数清零 end else cstate <= START; //等待scl高电平中间位置到来 等待数据开始传输 end ADD1: begin if(`SCL_LOW) begin if(num == 4'd8) begin num <= 4'd0; //num清零 sda_r <= 1'b1; //提高数据线sda,开始数据变化 sda_link <= 1'b0; //确定数据传输方向,数据线sda为input cstate <= ACK1; end else begin cstate <= ADD1; num <= num+1'b1; case (num) 4'd0: sda_r <= db_r[7]; 4'd1: sda_r <= db_r[6]; 4'd2: sda_r <= db_r[5]; 4'd3: sda_r <= db_r[4]; 4'd4: sda_r <= db_r[3]; 4'd5: sda_r <= db_r[2]; 4'd6: sda_r <= db_r[1]; 4'd7: sda_r <= db_r[0]; default: ; endcase end end else cstate <= ADD1; end ACK1: begin if(/*!sda*/`SCL_NEG) //注:24C01/02/04/08/16器件可以不考虑应答位 begin cstate <= ADD2; //从机响应信号 db_r <= BYTE_ADDR; // 1地址 end else cstate <= ACK1; //等待从机响应 end ADD2: begin if(`SCL_LOW) begin if(num == 4'd8) begin sda_link <= 1'b0; sda_r <= 1'b1; num <= 4'd0; cstate <= ACK2; end else begin sda_link <= 1'b1;//sda作为output cstate <= ADD2; num <= num+1'b1; case (num) 4'd0: sda_r <= db_r[7]; 4'd1: sda_r <= db_r[6]; 4'd2: sda_r <= db_r[5]; 4'd3: sda_r <= db_r[4]; 4'd4: sda_r <= db_r[3]; 4'd5: sda_r <= db_r[2]; 4'd6: sda_r <= db_r[1]; 4'd7: sda_r <= db_r[0]; default: ; endcase end end else cstate <= ADD2; end ACK2: begin if(/*!sda*/`SCL_NEG) begin //从机响应操作 cstate <= DATA; //写操作 db_r <= WRITE_DATA; //写入数据 end else cstate <= ACK2; //等待从机响应 end DATA: begin if(`SCL_LOW) begin if(num == 4'd8) begin sda_link <= 1'b0; sda_r <= 1'b1; num <= 4'd0; cstate <= ACK3; end else begin sda_link <= 1'b1; cstate <= DATA; num <= num+1'b1; case (num) 4'd0: sda_r <= db_r[7]; 4'd1: sda_r <= db_r[6]; 4'd2: sda_r <= db_r[5]; 4'd3: sda_r <= db_r[4]; 4'd4: sda_r <= db_r[3]; 4'd5: sda_r <= db_r[2]; 4'd6: sda_r <= db_r[1]; 4'd7: sda_r <= db_r[0]; default: ; endcase end end else cstate <= DATA; end ACK3: begin if(/*!sda*/`SCL_NEG) begin sda_r <= 1'b0; //拉低数据线sda,产生停止信号 sda_link <= 1'b1;//sda作为output cstate <= STOP1; end else cstate <= ACK3; end STOP1: begin if(`SCL_HIG) begin sda_link <= 1'b1; sda_r <= 1'b1; //拉低数据线sda,产生停止信号 cstate <= START; end else cstate <= STOP1; end default: cstate <= START; endcase end end assign sda = sda_link ? sda_r:1'bz; endmodule
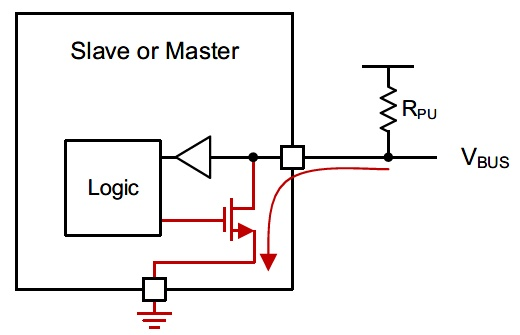
IIC的关键词:两线和低速,该总线采用开漏的结构可以很好地实现数据的双向传输,也就是说在要用到sda或者scl线的时候,可以通过内部的NMOS下拉为零,否则上拉为高电平
还需要注意的就是开始和结束条件,以及IIC协议的要求:
scl为高的器件,sda必须保持稳定,sda变化相对于scl变高有建立时间的要求,而sda变化相对于scl变低有保持时间的要求。scl低电平期间,数据sda才可以发生变化。而这里的建立保持时间是微秒级别的,所以IIC的速度慢,1MHz左右。从器件不适合高速数字逻辑单路。
然后具体的执行顺序为:
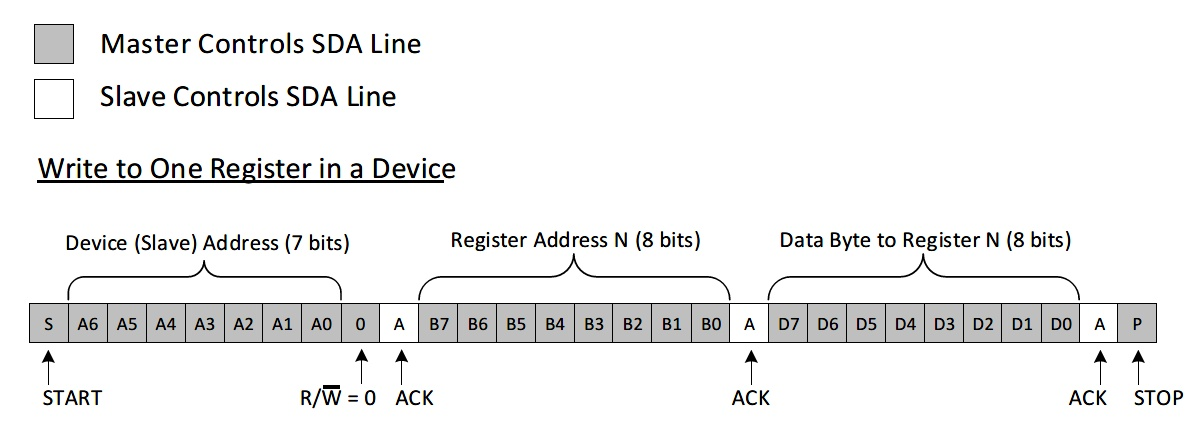
s1:Start+器件地址+应答信号+要发送的数据+应答信号。
通过scl和sda两条线的控制来实现数据的传输,其中的sda信号线是inout,因为作为串行数据传输线,它不仅要传输上位机的数据到下位机,此外还需要下位机发送一个响应到上位机去,所以实际上需要它是inout。
IIC通过器件的地址来区分从机,而SPI主要是通过作为主机的CS来区分从机的编码。
三、关于两者的对比:
首先是SPI的优点在于:
1.利于硬件实现,不需要多个器件地址,只用到4根数据线,封装简单
2.全双工传输,可以同时发送和接收数据
3.三态输出端口,相对IIC的开漏输出,抗干扰能力强,传输稳定
4.传输数据的速度在几百MHz远远高于IIC的几十Mhz
5.输入输出的比特数没有限制
缺点
1.信号线多,而且随着从器件的个数增加,芯片选择线会增加
2.传输过程没有确认信号,不知道从器件的接收情况。
3.没有校验机制,传输错误不会有提示。
IIC的优点:
控制线少,结构简单
IIC的缺点:
传输速度慢而且麻烦。