目录
一、图论
1.搜索
①双向bfs
②dfs
③记忆化
- 一般说来,动态规划总要遍历所有的状态,而搜索可以排除一些无效状态。
-
更重要的是搜索还可以剪枝,可能剪去大量不必要的状态,因此在空间开销上往往比动态规划要低很多。记忆化算法在求解的时候还是按着自顶向下的顺序,但是每求解一个状态,就将它的解保存下来,以后再次遇到这个状态的时候,就不必重新求解了。这种方法综合了搜索和动态规划两方面的优点,因而还是很有实用价值的。
- 搜索相对于动态规划最大的劣势无非就是重复计算子结构,所以我们在搜索的过程中,对于每一个子结构只计算一次,之后保存到数组里,以后要用到的时候直接调用就可以了,这就是记忆化搜索。
- 记忆化搜索=搜索的形式+动态规划的思想
- 可以用记忆化搜索计算状态转移方程。不必事先确定各状态的计算顺序,但需要记录每个状态 “是否已经计算过”。 ———刘汝佳《算法竞赛入门经典》
④迭代加深
- http://blog.csdn.net/u014800748/article/details/44998693
- http://blog.csdn.net/logo_fc/article/details/64541202
2.树
①树的重心和直径
树的重心
树的重心也叫树的质心。对于一棵树n个节点的无根树,找到一个点,使得把树变成以该点为根的有根树时,最大子树的结点树最小。
换句话说,删除这个点后最大连通块(一定是树)的结点数最小。
- http://blog.csdn.net/u013076044/article/details/45915745(树的重心的性质以及具体实现代码)
树的直径(树上最长路)
- http://www.cnblogs.com/wuyiqi/archive/2012/04/08/2437424.html(树的直径的详细证明)
- http://www.cnblogs.com/wuyiqi/archive/2012/03/10/2388501.html(实现代码)
②dfs序
③树链剖分
④LCA(http://www.cnblogs.com/JVxie/p/4854719.html)
在一棵没有环的树上,每个节点肯定有其父亲节点和祖先节点,而最近公共祖先,就是两个节点在这棵树上深度最大的公共的祖先节点。
换句话说,就是两个点在这棵树上距离最近的公共祖先节点。
所以LCA主要是用来处理当两个点仅有唯一一条确定的最短路径时的路径。
- 常用的求LCA的算法有:Tarjan/DFS+ST/倍增 (后两个算法都是在线算法,也很相似,时间复杂度在O(logn)~O(nlogn)之间,较难理解吧~)
- 有的题目可以用线段树来做,代码量很大,时间复杂度也偏高,在O(n)~O(nlogn)之间,优点在于简单粗暴
- Tarjan算法(离线):
- 在一次遍历中把所有询问一次性解决,所以其时间复杂度是O(n+q)。优点在于相对稳定,时间复杂度也比较居中,也很容易理解
- 基本思路:
1.任选一个点为根节点,从根节点开始。
2.遍历该点u所有子节点v,并标记这些子节点v已被访问过。
3.若是v还有子节点,返回2,否则下一步。
4.合并v到u上。
5.寻找与当前点u有询问关系的点v。
6.若是v已经被访问过了,则可以确认u和v的最近公共祖先为v被合并到的父亲节点a。
遍历的话需要用到dfs来遍历(我相信来看的人都懂吧...),至于合并,最优化的方式就是利用并查集来合并两个节点。
⑤Prufer编码和Cayley定理
⑥Prim堆优化 [ O(nlogn) ]、Kruskal [ O(mlogm) ]
- 两者区别
- PRIM是稠密图用的。KRUSKAL是稀疏图用的。
- prim针对点,kruskal针对边。一般都是推荐kruskal加路径压缩的启发式合并的并查集,prim加堆优化也不错,只是代码长了点(stl另当别论)
- 由于Kruskal里面需要用到排序,所以,时间复杂度受到了排序的影响。而且,Kruskal算法又是从边出发的,所以,如果边的数量太多的话,必定会影响排序所用的时间。因此,如果边的数量太多的话,最好是用Prim算法。相比较之下,Kruskal算法的代码比Prim稍微短一点。至于稳定性嘛~~~好像没什么区别....
——————出自 noip吧 Prim和 Kruskal的区别
⑦分治
3、图的联通
强连通分量
有向图强连通分量:在有向图G中,如果两个顶点vi,vj间(vi>vj)有一条从vi到vj的有向路径,同时还有一条从vj到vi的有向路径,则称两个顶点强连通(strongly connected)。如果有向图G的每两个顶点都强连通,称G是一个强连通图。有向图的极大强连通子图,称为强连通分量(strongly connected components)。
- 当 DFN(u) = Low(u) 时,以u为根的搜索子树上所有节点是一个强连通分量。(对于 DFN 和 low 的解释)
- Tarjan算法
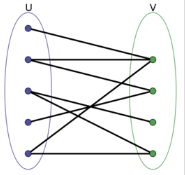
4、二分图
二分图又称作二部图,是图论中的一种特殊模型。 设G=(V,E)是一个无向图,如果顶点V可分割为两个互不相交的子集(A,B),并且图中的每条边(i,j)所关联的两个顶点i和j分别属于这两个不同的顶点集(i in A,j in B),则称图G为一个二分图。
5、欧拉图
相关性质:
1.无向连通图G是欧拉图,当且仅当G不含奇数度结点(G的所有结点度数为偶数);
6、拓扑排序
7、计算几何(先忽略这个)
二、技巧与思想
1、二分
2、离散化
3、位运算
4、分块
5、数列差分以及前缀和
6、哈夫曼编码
7、cdq分治
8、启发式合并