第四章
超越经典的搜索
一、局部搜索算法
条件
关注解状态而不是路径代价的问题(N皇后),找目标,纯粹最优化的问题。
思想
从单个当前结点出发,通常只移动到他的临近状态而不保留搜索路径。
优点
- 使用内存少。
- 能在很大或者无限状态空间中找到合理解。
具体算法
-
爬山法
-
思想
不断向值增加的方向持续移动,直到达到一个“峰顶”。
-
优点
使用内存少,速度快。
-
缺点
局部最优,在局部极大值、山脊、高原的情况下将陷入困境;
成功与否严重依赖与状态空间的地形图形状。
-
改进
-
随机爬山法
在上山移动中随机的选择下一步,每种走法被选中的概率随上山移动的陡峭程度不同而不同。
收敛速度慢,但在某些地形图上能找到更好的解。
-
首选爬山法
随机的生成后继结点,直到生成一个优于当前结点的后继。
适用于后继结点很多的情况。
-
随机重启爬山法
不断随机生成初始状态来引导爬山法的搜索,直到成功找到目标状态。
完备概率接近1。
-
-
-
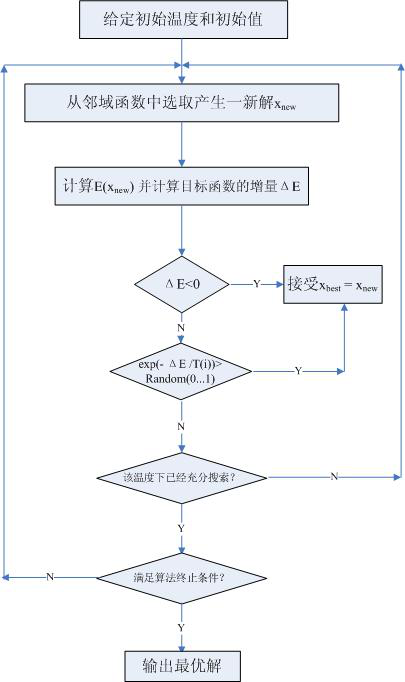
模拟退火搜索
-
思想
选择随机移动,允许算法向最坏的方向移动以摆脱局部最大值,但随着状态“变坏”与时间的推移,接受“坏移动”的概率下降。
-
类比关系
物理退火 退火算法 物体内部状态 问题解空间 状态能量 解的质量 温度 控制参数 加热(溶解)过程 设定初始控制参数 退火冷却过程 控制参数的修改 状态转移 解在领域中变化 能量最低状态 最优解 -
流程图
-
-
特点
如果时间下降得足够的慢,那么模拟退火算法找到一个全局最优值的概率接近于1
-
局部束搜索
-
思想
从k个随机生成的状态开始,每一步全部k个状态的所有后继会被随机生成。如果其中一个是目标状态,算法停止。否则,从后继中选择k个最佳的后继。重复这个过程。
-
特点
有用的信息在并行的搜索线程间传递。
状态缺乏多样性,可能聚集到状态空间的一小块区域内,使搜索代价比爬山法还高。
-
-
随机束搜索
-
思想
从k个随机生成的状态开始,每一步全部k个状态的所有后继会被随机生成。如果其中一个是目标状态,算法停止。否则,从后继中随机选择k个的后继,随机概率与状态值成正比。重复这个过程。
-
-
遗传算法
-
思想
从k个随机生成的状态开始,作为初始种群,其中每个状态叫做个体,对每个状态进行编码。根据适应度函数的值决定每个个体被选中的概率。选择k个状态作为父状态,每两个父状态交叉生成两个子状态。最后对子状态进行变异操作。重复直到得到目标解。
-
组成
-
染色体编码
二进制编码、格雷码等
-
种群初始化
-
适应度函数
演化过程中进行选择的唯一依据。对于好的状态,适应度函数返回较高的值。
-
遗传操作
-
选择
样本被选择繁衍后代的概率正比于它的适应度函数值
-
交叉
发生交叉操作的概率需要预先设定,交叉位置随机产生
-
变异
发生突变操作的概率需要预先设定,通常远小于交叉概率
-
-
算法参数
-
-
流程图

-
特点
优胜劣汰的选择机制使得适应值大的解有较高的存活率,这是遗传算法与一般搜索算法的主要区别之一。
为一些难以找到传统数学模型的难题指出了一个解决办法。
-
二、不确定动作的搜索
条件
不确定的环境,执行一个动作后状态的变化是不确定的。
与或搜索树

与或搜索问题的解是一颗子树(图中用粗线标出)。每个叶子上都有目标结点;在或节点上规范了一个行动;与结点上包含所有可能的后果。
算法
-
深度优先递归算法
关键:环的处理
如果当前状态与从根节点出发的路径上的状态相同,那么返回失败。
这样每条路都必定到达目标、重复状态或死胡同,这样就可以保证算法可以在有限的状态空间终止。
-
宽度优先
-
最佳优先
启发式函数概念必须修改为评估可能的解,而不是一个序列。
循环解

语法表示为
或
对于循环解,根据具体问题,决定不断尝试或尝试一定次数后放弃谁更合理。
三、使用部分可观察信息的搜索
无观察信息的搜索
无观察信息问题P的定义
-
信念状态
包含物理状态中每个可能的集合,假定N个物理状态,最多有(2^N)个信念状态
-
初始状态
所有物理状态的集合
-
行动
非法行动对环境无影响时

有影响时,可能取交集。
//吸尘器世界中,每个状态都有相同的合法行动,两种方法都有相同结果。
-
转移模型
对于确定行动
对于不确定行动
-
目标测试
信念状态中的所有物理状态都满足目标状态
-
路径开销
假定所有状态下一个行动的开销相同
搜索剪枝
检测状态是否重复。
如果一个行动序列是信念状态b的解,那么它也是b的任何子集的解。所以如果已经生成子集,那么可以丢弃到元集合的解。当原集合有解,那么他也是他的任何子集的解。
搜索困境
每个信念状态的大小。
通过用更紧凑的方式表示信念状态,或增量式信念状态搜索(首先找出适合状态1的解,看他是否也满足2;不满足则回溯找出状态1的另一种解,然后继续...)
有观察信息的搜索
状态转换步骤
预测阶段
给定信念状态b和行动a,预测信念状态
观察预测阶段
确定预测信念状态中可观察到的感知信息o
更新阶段
根据每个可能的感知信息得到信念状态
问题求解Agent
形式化,搜索算法,执行解行动
解是一个条件规划不是一个序列 if-then-else
Agent在完成行动和接收感知信息时维护自身的信念状态
四、联机搜索
条件
未知环境。
不知道在当前状态下采取行动后的对应状态,只能通过执行行动后再观察来确定。
联机与脱机
脱机搜索算法:在行动之间计算好完整的解决方案。
联机搜索算法:行动,观察环境,下一步行动。
竞争比
竞争比=实际代价/最小代价。
竞争比越小越好。
竞争比可以是无穷大,比如达到某些状态后无法达到目标状态(活动不可逆)。
可安全探索的状态空间:每个可达到的状态出发都有达到目标状态的行动,如迷宫问题,八数码问题。
欢迎指正与补充,感谢点赞o( ̄▽ ̄)d