zoukankan
html css js c++ java
机器学习——第四章笔记
线性判据与回归
线性判据基本概念
生成模型
判别模型
线性判据学习概述
线性判据
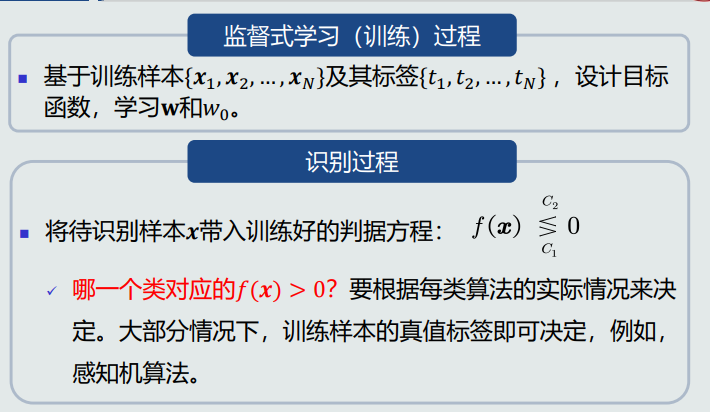
学习和识别过程
如何找最优解
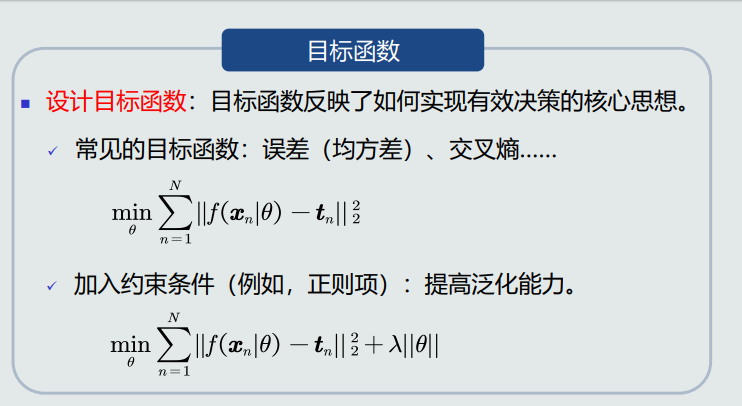
目标函数
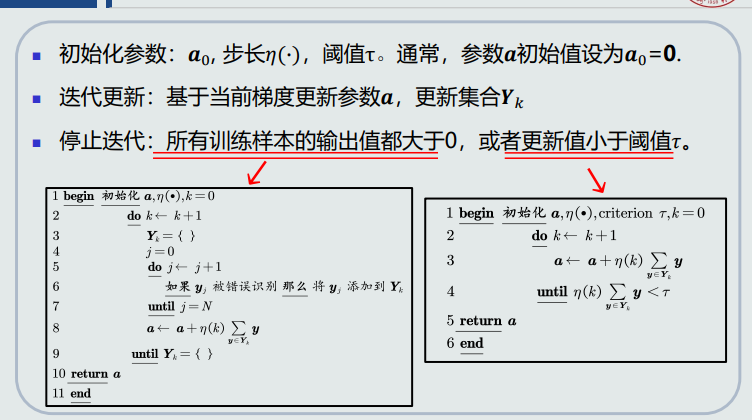
并行感知机算法
算法流程
串行感知机算法
算法流程
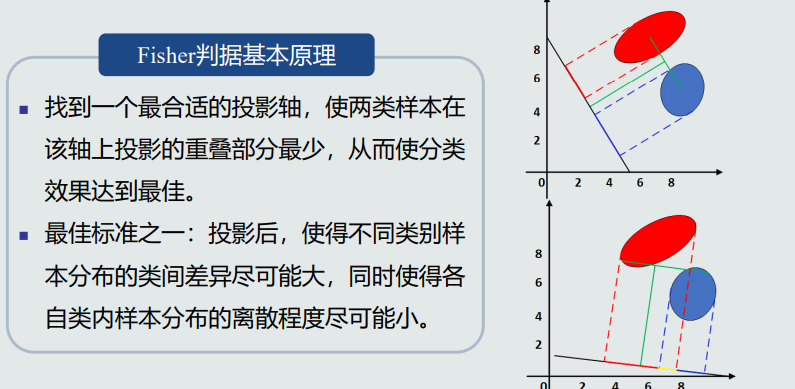
Fisher线性判据
设计动机:
线性判据的模型可以看做把原空间个点
x
投影到新的以为空间y
原理
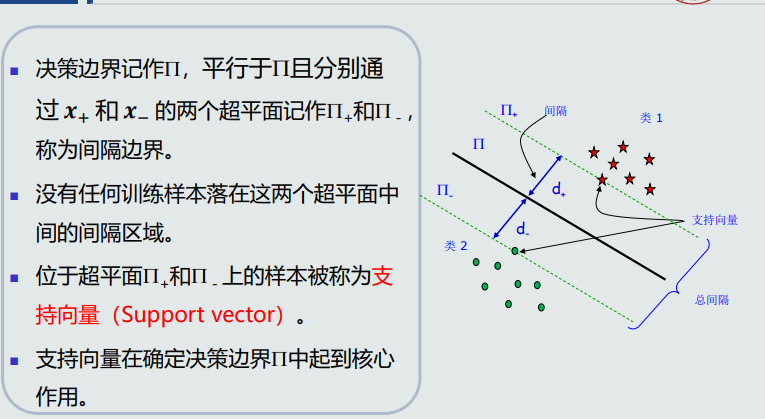
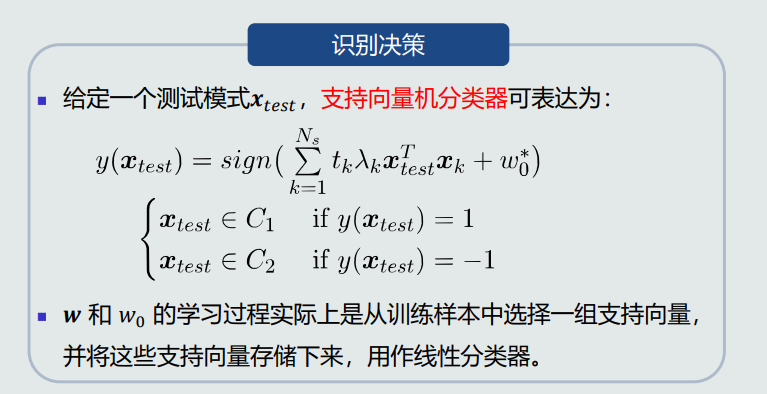
支持向量机基本概念
拉格朗日乘数法
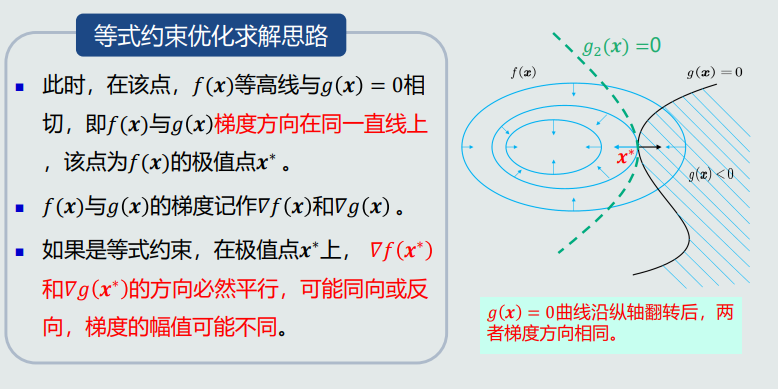
等式约束
拉格朗日对偶问题
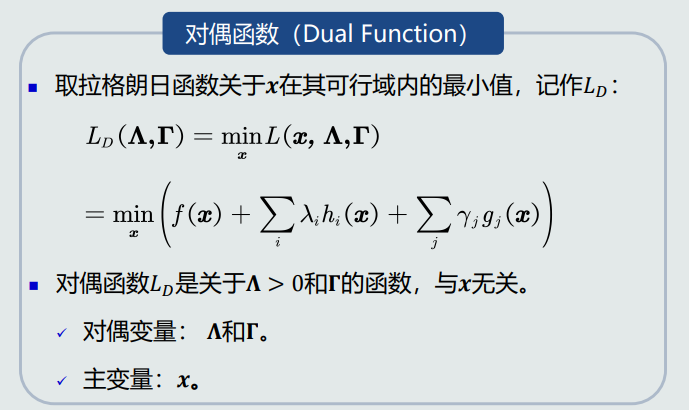
*对偶函数
支持向量机学习算法
算法过程
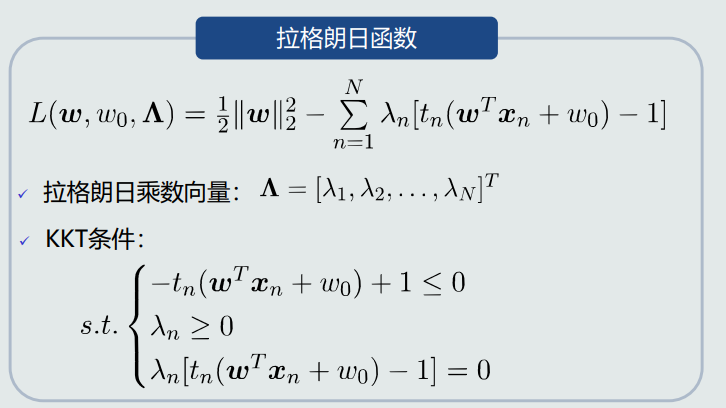
1构建拉格朗日函数
2构建对偶函数
决策过程
查看全文
相关阅读:
第二章 java内存区域与内存溢出异常
TCP实现可靠传输
Tomcat的类加载架构
浅析Synchronized
设计数据库
http和https
IOC容器的依赖注入
IOC容器初始化
深入理解Java内存模型
单例应该这么写
原文地址:https://www.cnblogs.com/Ike-shadow/p/12833313.html
最新文章
MEI card Spec
form表单操作
第二十二节
监控脚本
容器编排之Kubernetes1.10.2安装与配置
为什么使用docker
Linux_Shell_ Map 的使用和遍历
第二十节
第十九节
第十八节
热门文章
十五节
UVaOJ 1368
UVaOJ 227
UVA 1585
UVA 1586 ----Molar mass
SDUST T1584 G's present
SDUSTOJ T1581 Average Number
SDUSTOJ T1587 YES! YOU CAN!
第三章 垃圾收集器与内存分配策略
innoDB引擎幻读和不可重复读的区别
Copyright © 2011-2022 走看看