博客作者:凌逆战
博客地址:https://www.cnblogs.com/LXP-Never/p/10940123.html
这篇文章主要介绍使用Keras框架来实现RNN家族模型,TensorFlow实现RNN的代码可以参考我的另外一篇博客:TensorFlow中实现RNN,彻底弄懂time_step
Keras实现RNN模型
SimpleRNN层
keras.layers.GRU(units, activation='tanh', recurrent_activation='hard_sigmoid', use_bias=True, kernel_initializer='glorot_uniform', recurrent_initializer='orthogonal', bias_initializer='zeros', kernel_regularizer=None, recurrent_regularizer=None, bias_regularizer=None, activity_regularizer=None, kernel_constraint=None, recurrent_constraint=None, bias_constraint=None, dropout=0.0, recurrent_dropout=0.0, implementation=1, return_sequences=False, return_state=False, go_backwards=False, stateful=False, unroll=False)
参数:
- units:输出维度
- activation:激活函数(参考激活函数)
- use_bias: 布尔值,是否使用偏置项
- kernel_initializer:
kernel权重矩阵的初始化器,用于输入的线性转换(参见初始化器) - recurrent_initializer:
recurrent_kernel权重矩阵的初始化程序,用于循环状态的线性转换(参见初始化程序) - bias_initializer:偏置向量的初始化器(参见初始化器)
- kernel_regularizer:应用于
kernel权重矩阵的正则化函数(参见正则化器) - bias_regularizer:应用于偏置向量的正则化函数(参见正则化器)
- recurrent_regularizer:应用于
recurrent_kernel权重矩阵的正则化函数(参见正则化器) - activity_regularizer:应用于图层输出的正则化函数(其“激活”)。(见规范者)
- kernel_constraints:应用于
kernel权重矩阵的约束函数(请参阅约束) - recurrent_constraints:应用于
recurrent_kernel权重矩阵的约束函数(请参阅约束) - bias_constraints:应用于偏置向量的约束函数(请参阅约束)
- dropout:0~1之间的浮点数,控制输入线性变换的神经元断开比例
- recurrent_dropout:0~1之间的浮点数,控制循环状态的线性变换的神经元断开比例
- 其他参数参考Recurrent的说明
GRU层
门限循环单元
keras.layers.recurrent.GRU(units, activation='tanh', recurrent_activation='hard_sigmoid', use_bias=True, kernel_initializer='glorot_uniform', recurrent_initializer='orthogonal', bias_initializer='zeros', kernel_regularizer=None, recurrent_regularizer=None, bias_regularizer=None, activity_regularizer=None, kernel_constraint=None, recurrent_constraint=None, bias_constraint=None, dropout=0.0, recurrent_dropout=0.0)
参数:
- units:正整数,输出空间的维数
- 激活:要使用的激活功能(请参阅激活)
- recurrent_activation:用于循环步骤的激活功能(参见激活)。
- use_bias:Boolean,该层是否使用偏向量
- kernel_initializer:
kernel权重矩阵的初始化器,用于输入的线性转换(参见初始化器) - recurrent_initializer:
recurrent_kernel权重矩阵的初始化程序,用于循环状态的线性转换(参见初始化程序) - bias_initializer:偏置向量的初始化器(参见初始化器)
- kernel_regularizer:应用于
kernel权重矩阵的正则化函数(参见正则化器) - recurrent_regularizer:应用于
recurrent_kernel权重矩阵的正则化函数(参见正则化器) - bias_regularizer:应用于偏置向量的正则化函数(参见正则化器)
- activity_regularizer:应用于图层输出的正则化函数(其“激活”)。(见规范者)
- kernel_constraint:应用于
kernel权重矩阵的约束函数(请参阅约束) - recurrent_constraint:应用于
recurrent_kernel权重矩阵的约束函数(请参阅约束) - bias_constraint:应用于偏置向量的约束函数(请参阅约束)
- dropout:浮点数介于0和1之间。为输入的线性变换而下降的单位的分数
- recurrent_dropout:浮点数在0和1之间。对于循环状态的线性变换,单位的分数下降
- implementation:实现模式,1或2.模式1将其操作构造为更大数量的较小点产品和添加,而模式2将其分组为更少,更大的操作。这些模式将在不同硬件和不同应用程序上具有不同的性能配置文件。
- return_sequences:布尔值。是返回输出序列中的最后一个输出,还是返回完整序列。
- return_state:布尔值。是否返回除输出之外的最后一个状态。
- go_backwards:Boolean(默认为False)。如果为True,则向后处理输入序列并返回相反的序列。
- stateful:Boolean(默认为False)。如果为True,则批次中索引i处的每个样本的最后状态将用作后续批次中索引i的样本的初始状态。
- unroll:Boolean(默认为False)。如果为True,则将展开网络,否则将使用符号循环。展开可以加速RNN,尽管它往往会占用大量内存。展开仅适用于短序列。
- reset_after:GRU约定(是否在矩阵乘法之前或之前应用复位门)。False =“之前”(默认),True =“之后”(CuDNN兼容)。
LSTM
长短期记忆网络
keras.layers.LSTM(units, activation='tanh', recurrent_activation='hard_sigmoid', use_bias=True, kernel_initializer='glorot_uniform', recurrent_initializer='orthogonal', bias_initializer='zeros', unit_forget_bias=True, kernel_regularizer=None, recurrent_regularizer=None, bias_regularizer=None, activity_regularizer=None, kernel_constraint=None, recurrent_constraint=None, bias_constraint=None, dropout=0.0, recurrent_dropout=0.0, implementation=1, return_sequences=False, return_state=False, go_backwards=False, stateful=False, unroll=False)
参数:
- units:正整数,输出空间的维数
- 激活:要使用的激活功能(请参阅激活)
- recurrent_activation:用于循环步骤的激活功能(参见激活)
- use_bias:Boolean,该层是否使用偏向量
- kernel_initializer:
kernel权重矩阵的初始化程序,用于输入的线性变换。(见初始化者) - recurrent_initializer:
recurrent_kernel权重矩阵的初始化程序,用于循环状态的线性转换。(见初始化者) - bias_initializer:偏置向量的初始化器(参见初始化器)
- unit_forget_bias:布尔值。如果为True,则在初始化时将忘记门的偏差加1。将其设置为true也会强制执行
bias_initializer="zeros" - kernel_regularizer:应用于
kernel权重矩阵的正则化函数(参见正则化器) - recurrent_regularizer:应用于
recurrent_kernel权重矩阵的正则化函数(参见正则化器) - bias_regularizer:应用于偏置向量的正则化函数(参见正则化器)
- activity_regularizer:应用于图层输出的正则化函数(其“激活”)。(见规范者)
- kernel_constraint:应用于
kernel权重矩阵的约束函数(请参阅约束) - recurrent_constraint:应用于
recurrent_kernel权重矩阵的约束函数(请参阅约束) - bias_constraint:应用于偏置向量的约束函数(请参阅约束)
- dropout:浮点数介于0和1之间。为输入的线性变换而下降的单位的分数
- recurrent_dropout:浮点数在0和1之间。对于循环状态的线性变换,单位的分数下降
- 实现:实现模式,1或2.模式1将其操作构造为更大数量的较小点产品和添加,而模式2将其分组为更少,更大的操作。这些模式将在不同硬件和不同应用程序上具有不同的性能配置文件
- return_sequences:布尔值。默认
False。若为True,在输出序列中,返回全部 hidden state值;若为False,返回单个time step 的 hidden state值。 - return_state:布尔值。默认False,True:返回hidden state之外,还要返回最后一个cell state状态
- go_backwards:Boolean(默认为False)。如果为True,则向后处理输入序列并返回相反的序列
- stateful:Boolean(默认为False)。如果为True,则批次中索引i处的每个样本的最后状态将用作后续批次中索引i的样本的初始状态
- unroll:Boolean(默认为False)。如果为True,则将展开网络,否则将使用符号循环。展开可以加速RNN,尽管它往往会占用大量内存。展开仅适用于短序列
还有许多ConvLSTM2D:卷积LSTM。它类似于LSTM层,但输入转换和循环转换都是卷积的。
在这里我们细讲一下return_sequences和return_state,这部分主要参考EastWR的CSDN博客。
首先我们需要先了解一下cell state和hidden state。在LSTM网络中,直接根据当前input数据,得到的输出称为hidden state。还有一种数据是不仅仅依赖于当前输入数据,而是一种伴随整个网络过程中用来记忆,遗忘,选择并最终影响 hidden state 结果的东西,称为 cell state。cell state 就是实现 long short memory 的关键。cell state 是不输出的,它仅对输出 hidden state 产生影响。通常情况,我们不需要访问 cell state,除非想设计复杂的网络结构。
h = LSTM(X)
return_sequences和return_state默认就是false。此时只会返回一个hidden state 值。如果input 数据包含多个时间步,则这个hidden state 是最后一个时间步的结果
LSTM(1, return_sequences=True)
return_sequences=True,return_state=False。输出的hidden state 包含全部时间步的结果。
lstm1, state_h, state_c = LSTM(1, return_state=True)
return_sequences=False,return_state=True。lstm1 和 state_h 结果都是 hidden state。在这种参数设定下,它们俩的值相同。都是最后一个时间步的 hidden state。 state_c 是最后一个时间步 cell state结果。
lstm1, state_h, state_c = LSTM(1, return_sequences=True, return_state=True)
此时,我们既要输出全部时间步的 hidden state ,又要输出 cell state。lstm1 存放的就是全部时间步的 hidden state。state_h 存放的是最后一个时间步的 hidden state,state_c 存放的是最后一个时间步的 cell state。
有状态RNN和无状态RNN
而stateless指的只是样本内的信息传递。
timestep时间步长,也可以理解为展开的rnn或者lstm的block的个数,(batch_size, time_steps, input_size)
举个例子来讲解一下timestep、batch、batchsize、input_size在LSTM中的关系,假如我们有一篇文章X,其中每个句子X[i]作为一个训练对象(sequence)。一句话里面每个字代表一个timestep时间步,一个epoch里面分batch的训练数据,每一个batch的一个样本里面,分timestep的训练句子中的依赖关系。
stateless LSTM
和DNN、CNN神经网络一样训练
stateful LSTM
有状态的RNN能够在训练中维护跨批次的有状态信息,即当前批次的训练数据计算的状态值,可以用作下一批次训练数据的初始隐藏状态。stateful代表除了每个样本内的时间步内传递,而且每个样本之间会有信息(c,h)传递,
优点:更小的网络,或者更少的训练时间
缺点:需要数据batchsize来训练网络,并在每个训练epoch后重置状态,
实现步骤:
- 必须将batch_size参数显式的传递给模型的第一层
- 在RNN层中设置stateful=True
- 在调用fit()时指定shuffle=False,打乱样本之后,sequence之间就没有依懒性了。
- 训练完一个epoch后,要重置状态
- 使用 model.reset_states()来重置模型中所有层的状态。
- 使用layer.reset_states()来重置指定有状态 RNN 层的状态
顺序模型,方式一:LSTM(hidden_size, stateful=True, batch_input_shape=(batch_size, timestep, input_dim))
函数式模型,方式一:如果是带有 1 个或多个 Input 层的函数式模型,为你的模型的所有第一层传递一个 batch_shape=(...)。 这是你的输入的预期尺寸,包括批量维度。 它应该是整数的元组,例如 (32, 10, 100)。
方式二:LSTM(hidden_size, stateful=True, input_shape=(data[1], data[2]), batch_size)
如果下一层还是LSTM层的话,需要把隐藏层状态全部返回给下一层LSTM层,设置return_sequences=True:
LSTM(hidden_size, stateful=True, batch_input_shape=(batch_size, timestep, input_dim), return_sequences=True)
训练阶段:
for i in range(epochs):
model.fit(x_train, y_train, batch_size, epochs=1, validation_data=(x_test, y_test), shuffle=False)
model.reset_states()
from keras.models import Sequential from keras.layers import LSTM, Dense import numpy as np import math data_dim = 16 timesteps = 8 num_classes = 10 batch_size = 32 num_epochs = 800 # 期望输入数据尺寸: (batch_size, timesteps, data_dim) # 请注意,我们必须提供完整的 batch_input_shape,因为网络是有状态的。 # 第 k 批数据的第 i 个样本是第 k-1 批数据的第 i 个样本的后续。 model = Sequential() model.add(LSTM(32, return_sequences=True, stateful=True, batch_input_shape=(batch_size, timesteps, data_dim))) model.add(LSTM(32, return_sequences=True, stateful=True)) model.add(LSTM(32, stateful=True)) model.add(Dense(10, activation='softmax')) model.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy']) # 生成虚拟训练数据 x_train = np.random.random((batch_size * 10, timesteps, data_dim)) # (320, 8, 16) y_train = np.random.random((batch_size * 10, num_classes)) # (320, 10) # 生成虚拟验证数据 x_val = np.random.random((batch_size * 3, timesteps, data_dim)) # (96, 8, 16) y_val = np.random.random((batch_size * 3, num_classes)) for i in range(num_epochs): print("Epoch {:d}/{:d}".format(i+1, num_epochs)) model.fit(x_train, y_train, batch_size=batch_size, epochs=1, validation_data=(x_val, y_val), shuffle=False) model.reset_states() score, _ = model.evaluate(x_val, y_val, batch_size=batch_size) # 返回误差值和度量值 rmse = math.sqrt(score) print(" MSE: {:.3f}, RMSE: {:.3f}".format(score, rmse)) pre = model.predict(x_val, batch_size=batch_size)
Concatenate
keras.layers.Concatenate([input1, input2 ...], axis=-1)
张量串联,它将一个张量的列表作为输入,除了要连接的轴shape值之外其他轴的shape值都要相同,并返回单个张量,即所有输入张量的串联。
嵌入层Embedding
keras.layers.embeddings.Embedding(input_dim, output_dim, embeddings_initializer='uniform', embeddings_regularizer=None, activity_regularizer=None, embeddings_constraint=None, mask_zero=False, input_length=None)
嵌入层将正整数(下标)转换为具有固定大小的向量,如[[4],[20]]-->[[0.25,0.1],[0.6,-0.2]]
该层支持对具有可变时间步长的输入数据进行masking。如果想将输入数据的一部分屏蔽掉,请使用Embedding层并将参数mask_zero设为True。
Embedding层只能作为模型的第一层
参数:
- input_dim:int> 0.词汇表的大小,即最大整数索引+ 1。
- output_dim:int> = 0.Dense嵌入的维度。
- embeddings_initializer:
embeddings矩阵的初始化器(参见初始化器) - embeddings_regularizer:应用于
embeddings矩阵的正则化函数(参见正则化器) - activity_regularizer:应用于图层输出的正则化函数(其“激活”)(见规范者)
- embeddings_constraint:应用于
embeddings矩阵的约束函数(请参阅约束) - mask_zero:输入值0是否是应屏蔽的特殊“padding”值。这在使用可能需要可变长度输入的循环层时很有用。如果mask_zero设置为True,则结果是索引0不能在词汇表
- input_length:输入序列的长度,当其为常量时。如果要在上游连接“Flatten”和“Dense”,则需要此参数。
输入形状:2D张量形状:(batch_size, sequence_length)
输出形状:3D张量与形状:(batch_size, sequence_length, output_dim)
import numpy as np model = Sequential() # 词汇表的大小为999+1,Dense嵌入的维度为64,输入序列长度为10 model.add(Embedding(1000, 64, input_length=10)) # 模型输入 (batch, input_length) # 输入中的最大整数(即字索引)应为 不大于999(词汇大小)。 # 现在model.output_shape==(none,10,64),其中none是batch dimension. input_array = np.random.randint(1000, size=(32, 10)) # shape=(32,10) model.compile('rmsprop', 'mse') output_array = model.predict(input_array) assert output_array.shape == (32, 10, 64)
Embedding层还不是很熟悉,要学会和LSTM相结合。
Masking层
keras.layers.core.Masking(mask_value=0.0)
使用给定的mask_value值对输入的序列信号进行“屏蔽”,用以定位需要跳过的时间步
对于输入张量的时间步,即输入张量的第1维度(维度从0开始算,见例子),如果输入张量在该时间步上都等于mask_value,则该时间步将在模型接下来的所有层(只要支持masking)被跳过(屏蔽)。
如果模型接下来的一些层不支持masking,却接受到masking过的数据,则抛出异常。
例子
考虑输入数据x是一个形如(batch_size,timesteps,features)的张量,现将其送入LSTM层。因为你缺少时间步为3和5的信号,所以你希望将其掩盖。这时候应该:
- 赋值
x[:,3,:] = 0.,x[:,5,:] = 0. - 在LSTM层之前插入
mask_value=0.的Masking层
model = Sequential() model.add(Masking(mask_value=0., input_shape=(timesteps, features))) model.add(LSTM(32))
参数:
msak_value:None或要跳过的掩码值
model.summary() # 在模型编译之后,打印网络结构
print(model.output_shape) # 打印模型输出
使用LSTM序列分类
from keras.models import Sequential from keras.layers import Dense, Dropout from keras.layers import Embedding from keras.layers import LSTM model = Sequential() model.add(Embedding(max_features, output_dim=256)) model.add(LSTM(128)) model.add(Dropout(0.5)) model.add(Dense(1, activation='sigmoid')) model.compile(loss='binary_crossentropy', optimizer='rmsprop', metrics=['accuracy']) model.fit(x_train, y_train, batch_size=16, epochs=10) score = model.evaluate(x_test, y_test, batch_size=16)
用于序列分类的栈式LSTM
在该模型中,我们将三个LSTM堆叠在一起,使该模型能够学习更深层次的时域特征表示。
开始的两层LSTM返回其全部时间步的hidden state,而第三层LSTM只返回最后一个时间步的hidden state,从而其时域维度降低(即将输入序列转换为单个向量)
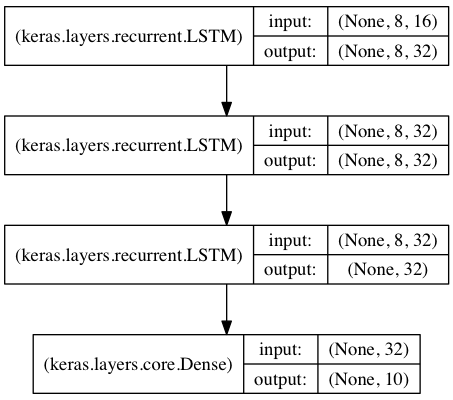
from keras.models import Sequential from keras.layers import LSTM, Dense import numpy as np data_dim = 16 timesteps = 8 num_classes = 10 # 预期输入数据shape: (batch_size, timesteps, data_dim) model = Sequential() model.add(LSTM(32, return_sequences=True, input_shape=(timesteps, data_dim))) # (None, 8, 32) model.add(LSTM(32, return_sequences=True)) # (None, 8, 32) model.add(LSTM(32)) # (None, 32) model.add(Dense(10, activation='softmax')) # (None, 10) model.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy']) print(model.summary()) # 生成虚拟训练数据 x_train = np.random.random((1000, timesteps, data_dim)) # (1000, 8, 16) y_train = np.random.random((1000, num_classes)) # 生成虚拟验证数据 x_val = np.random.random((100, timesteps, data_dim)) y_val = np.random.random((100, num_classes)) model.fit(x_train, y_train, batch_size=64, epochs=5, validation_data=(x_val, y_val))
采用stateful LSTM的相同模型
一个RNN是状态RNN,意味着训练时每个batch的状态都会被用于初始化下一个batch的初始状态。
当使用状态RNN时,有如下假设
- 所有的batch都具有相同数目的样本
- 如果
X1和X2是两个相邻的batch,那么对于任何i,X2[i]都是X1[i]的后续序列
要使用状态RNN,我们需要在实例化层对象时指定参数stateful=True
- 显式的指定每个batch的大小。可以通过模型的首层参数。
batch_input_shape是一个整数tuple。例如(32,10,16)代表一个具有10个时间步,每步向量长为16,每32个样本构成一个batch的输入数据格式。 - 在函数式模型中,对所有的输入都要指定相同的
batch_size。
要重置循环网络的状态,使用:
model.reset_states()来重置网络中所有层的状态layer.reset_states()来重置指定层的状态
from keras.models import Sequential from keras.layers import Dense, recurrent import numpy as np X = np.ones(shape=(32, 21, 16)) # 输入数据的shape(32, 21, 16) # 我们将把它按长度10的顺序输入我们的模型 model = Sequential() model.add(recurrent.LSTM(32, input_shape=(10, 16), batch_size=32, stateful=True)) print(model.output_shape) # (32, 32) model.add(Dense(16, activation='softmax')) print(model.output_shape) # (32, 16) model.compile(optimizer='rmsprop', loss='categorical_crossentropy') # 我们训练网络预测前10个时间点的第11个时间点: print(X[:, :10, :].shape) # (32, 10, 16) print(X[:, 10, :].shape) # (32, 16) model.train_on_batch(X[:, :10, :], np.reshape(X[:, 10, :], (32, 16))) # 网络状态已更改。我们可以输入后续序列: model.train_on_batch(X[:, 10:20, :], np.reshape(X[:, 20, :], (32, 16))) model.reset_states() # 让我们重置LSTM层的状态: model.layers[0].reset_states() # 重置LSTM某一层状态
注意,predict,fit,train_on_batch ,predict_classes等方法都会更新模型中状态层的状态。这使得你不但可以进行状态网络的训练,也可以进行状态网络的预测。
stateful LSTM的特点是,在处理过一个batch的训练数据后,其内部状态(记忆)会被作为下一个batch的训练数据的初始状态。状态LSTM使得我们可以在合理的计算复杂度内处理较长序列
from keras.models import Sequential from keras.layers import LSTM, Dense import numpy as np data_dim = 16 timesteps = 8 num_classes = 10 batch_size = 32 # 预期的 input batch shape: (batch_size, timesteps, data_dim) # 注意,由于网络是有状态的,所以我们必须提供完整的batch_input_shape # 索引为 I 的 第k个batch的样本是k-1 batch 样本 后续跟进 model = Sequential() model.add(LSTM(32, return_sequences=True, stateful=True, batch_input_shape=(batch_size, timesteps, data_dim))) model.add(LSTM(32, return_sequences=True, stateful=True)) model.add(LSTM(32, stateful=True)) model.add(Dense(10, activation='softmax')) model.compile(loss='categorical_crossentropy', optimizer='rmsprop', metrics=['accuracy']) # 生成虚拟训练数据 x_train = np.random.random((batch_size * 10, timesteps, data_dim)) y_train = np.random.random((batch_size * 10, num_classes)) # 生成虚拟验证数据 x_val = np.random.random((batch_size * 3, timesteps, data_dim)) y_val = np.random.random((batch_size * 3, num_classes)) model.fit(x_train, y_train, batch_size=batch_size, epochs=5, shuffle=False, validation_data=(x_val, y_val))
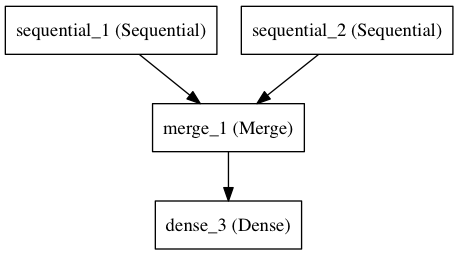
将两个LSTM合并作为编码端来处理两路序列的分类
在本模型中,两路输入序列通过两个LSTM被编码为特征向量
两路特征向量被串连在一起,然后通过一个全连接网络得到结果,示意图如下:
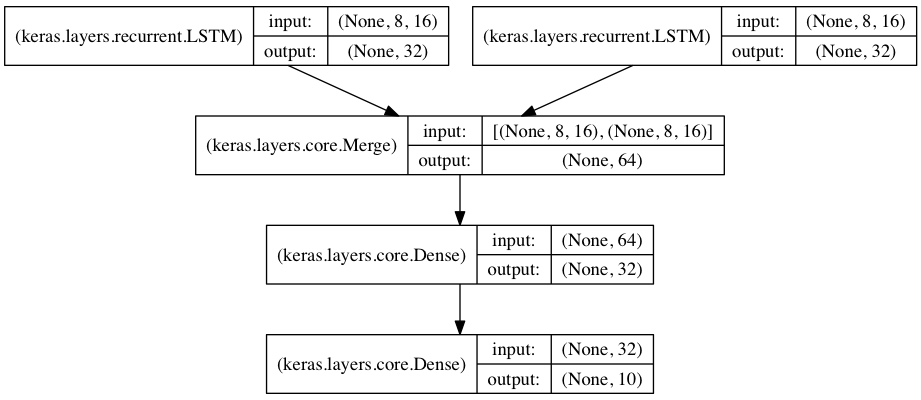
也就是用Concatenate,把上面两个输出串联起来了。