一、卷积:
卷积在 pytorch 中有两种方式: 【实际使用中基本都使用 nn.Conv2d() 这种形式】
- 一种是
torch.nn.Conv2d(), - 一种是
torch.nn.functional.conv2d(),
这两种形式本质都是使用一个卷积操作,这两种形式的卷积对于输入的要求都是一样的,首先需要输入是一个 torch.autograd.Variable() 的类型,大小是 (batch, channel, H, W),其中 batch 表示输入的一批数据的数目,第二个是输入的通道数,一般一张彩色的图片是 3,灰度图是 1,而卷积网络过程中的通道数比较大,会出现几十到几百的通道数,H 和 W 表示输入图片的高度和宽度,比如一个 batch 是 32 张图片,每张图片是 3 通道,高和宽分别是 50 和 100,那么输入的大小就是 (32, 3, 50, 100)。
下面举例来说明一下这两种卷积方式:
-
将图片转化成输入的tensor形式:
import numpy as np import torch from torch import nn from torch.autograd import Variable import torch.nn.functional as F from PIL import Image import matplotlib.pyplot as plt %matplotlib inline
im = Image.open('./cat.png').convert('L') # 读入一张灰度图的图片 im = np.array(im, dtype='float32') # 将其转换为一个矩阵
# 可视化图片 plt.imshow(im.astype('uint8'), cmap='gray')

# 将图片矩阵转化为 pytorch tensor,并适配卷积输入的要求 im = torch.from_numpy(im.reshape((1, 1, im.shape[0], im.shape[1])))
-
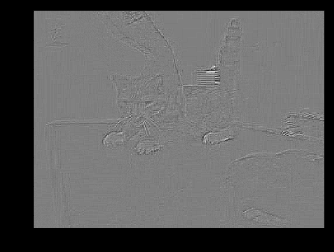
使用卷积进行轮廓检测:
1、使用nn.Conv2d:
# 使用 nn.Conv2d conv1 = nn.Conv2d(1, 1, 3, bias=False) # 定义卷积 sobel_kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32') # 定义轮廓检测算子 sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3)) # 适配卷积的输入输出 conv1.weight.data = torch.from_numpy(sobel_kernel) # 给卷积的 kernel 赋值 edge1 = conv1(Variable(im)) # 作用在图片上 edge1 = edge1.data.squeeze().numpy() # 将输出转换为图片的格式 #可视化: plt.imshow(edge1, cmap='gray')
2、使用F.conv2d:
# 使用 F.conv2d sobel_kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32') # 定义轮廓检测算子 sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3)) # 适配卷积的输入输出 weight = Variable(torch.from_numpy(sobel_kernel)) edge2 = F.conv2d(Variable(im), weight) # 作用在图片上 edge2 = edge2.data.squeeze().numpy() # 将输出转换为图片的格式 plt.imshow(edge2, cmap='gray')

可以看到两种形式能够得到相同的效果,不同的地方相信你也看到了,使用 nn.Conv2d() 相当于直接定义了一层卷积网络结构,而使用 torch.nn.functional.conv2d() 相当于定义了一个卷积的操作,所以使用后者需要再额外去定义一个 weight,而且这个 weight 也必须是一个 Variable,而使用 nn.Conv2d() 则会帮我们默认定义一个随机初始化的 weight,如果我们需要修改,那么取出其中的值对其修改,如果不想修改,那么可以直接使用这个默认初始化的值,非常方便
二、池化层
卷积网络中另外一个非常重要的结构就是池化,这是利用了图片的下采样不变性,即一张图片变小了还是能够看出了这张图片的内容,而使用池化层能够将图片大小降低,非常好地提高了计算效率,同时池化层也没有参数。池化的方式有很多种,比如最大值池化,均值池化等等,在卷积网络中一般使用最大值池化。
在 pytorch 中最大值池化的方式也有两种:【实际使用中,我们一般使用 nn.MaxPool2d()】
- 一种是
nn.MaxPool2d(), - 一种是
torch.nn.functional.max_pool2d(),
他们对于图片的输入要求跟卷积对于图片的输入要求是一样了,就不再赘述,下面我们也举例说明:
-
# 使用 nn.MaxPool2d:
# 使用 nn.MaxPool2d pool1 = nn.MaxPool2d(2, 2) print('before max pool, image shape: {} x {}'.format(im.shape[2], im.shape[3])) small_im1 = pool1(Variable(im)) small_im1 = small_im1.data.squeeze().numpy() print('after max pool, image shape: {} x {} '.format(small_im1.shape[0], small_im1.shape[1])) plt.imshow(small_im1, cmap='gray')

可以看到图片几乎没有变化,说明池化层只是减小了图片的尺寸,并不会影响图片的内容
-
使用 F.max_pool2d:
# F.max_pool2d print('before max pool, image shape: {} x {}'.format(im.shape[2], im.shape[3])) small_im2 = F.max_pool2d(Variable(im), 2, 2) small_im2 = small_im2.data.squeeze().numpy() print('after max pool, image shape: {} x {} '.format(small_im1.shape[0], small_im1.shape[1])) plt.imshow(small_im2, cmap='gray')
