本文主要讲解两部分内容,不做任何转发,仅个人学习记录:
一. Arduino 与 SPI 结合使用 :
二. SPI 深层理解
有价值的几个好的参考:
1. 中文版: https://blog.csdn.net/xxxxxx91116/article/details/42620413 这版本适合比较容易理解大概, 细节翻译还是要去英文版:https://www.arduino.cc/en/Tutorial/SPIEEPROM
2 .https://www.cnblogs.com/adylee/p/5399742.html 以及 https://blog.csdn.net/weixin_40117614/article/details/84070130(其中:2.2传输数据步骤如下 mode似乎弄混了,mode0与mode2在第一次采样之前已发送1bit 而mode1和mode3则是正常的发送再采样,有待考证)
一. Arduino 与 SPI 结合使用 :
1.串行外围设备接口入门(Introduction to the Serial Peripheral Interface)

2.串行EEPROM简介

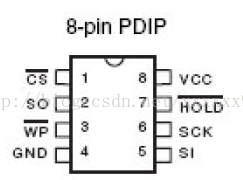
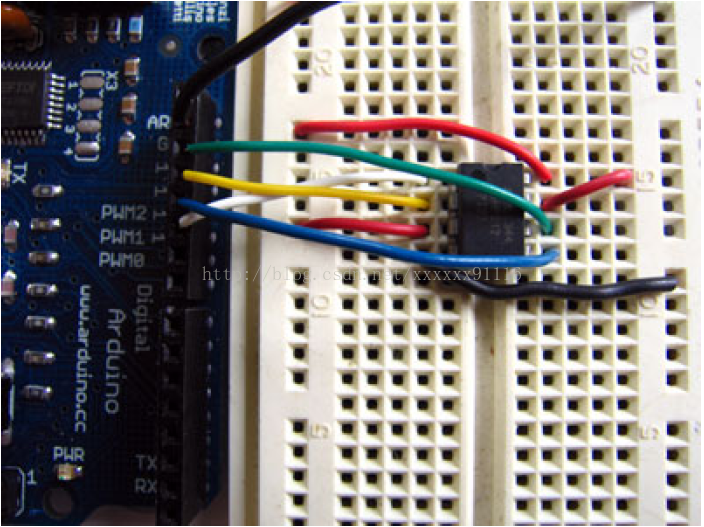
3.面包板的准备

4.Arduino SPI 编程





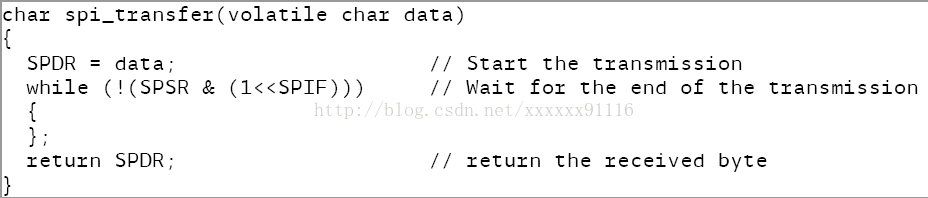
spi_transfer函数将要传出的数据放入数据传输寄存器,然后就开始SPI传输了哈。可以通过SPI状态寄存器(SPSR)的某个位(SPIF)来查看数据传输是否结束了。关于位掩码(bit mask)可以参考这里:http://www.arduino.cc/en/Tutorial/。最后返回写入EEPROM的数据。
read_eeprom函数允许我们从EEPROM中读入数据,首先设置SLAVESELECT为低来enable设备。接下来送入一个读指定,接下来送入要读的16位地址,最高有效位有限。接下来我们发送一个假数据到EEPROM中以将数据传出。最后我们在读入一个字节后,再次设置SLAVESELECT线为高来释放设备,并返回数据,如果我们想要一次读入多个数据,那么当我们重复data=spi_transfer(0XFF)时,需要将SLAVESELECT一直设置为低,这样来回128次后读出整个页的数据:

为了方便大家CTRL+c、 CTRL+v,下面是整个手册的源码:
#define DATAOUT 11//MOSI
#define DATAIN 12//MISO
#define SPICLOCK 13//sck
#define SLAVESELECT 10//ss
//opcodes
#define WREN 6
#define WRDI 4
#define RDSR 5
#define WRSR 1
#define READ 3
#define WRITE 2
byte eeprom_output_data;
byte eeprom_input_data=0;
byte clr;
int address=0;
//data buffer
char buffer [128];
void fill_buffer()
{
for (int I=0;I<128;I++)
{
buffer[I]=I;
}
}
char spi_transfer(volatile char data)
{
SPDR = data; // Start the transmission
while (!(SPSR & (1<<SPIF))) // Wait the end of the transmission
{
};
return SPDR; // return the received byte
}
void setup()
{
Serial.begin(9600);
pinMode(DATAOUT, OUTPUT);
pinMode(DATAIN, INPUT);
pinMode(SPICLOCK,OUTPUT);
pinMode(SLAVESELECT,OUTPUT);
digitalWrite(SLAVESELECT,HIGH); //disable device
// SPCR = 01010000
//interrupt disabled,spi enabled,msb 1st,master,clk low when idle,
//sample on leading edge of clk,system clock/4 rate (fastest)
SPCR = (1<<SPE)|(1<<MSTR);
clr=SPSR;
clr=SPDR;
delay(10);
//fill buffer with data
fill_buffer();
//fill eeprom w/ buffer
digitalWrite(SLAVESELECT,LOW);
spi_transfer(WREN); //write enable
digitalWrite(SLAVESELECT,HIGH);
delay(10);
digitalWrite(SLAVESELECT,LOW);
spi_transfer(WRITE); //write instruction
address=0;
spi_transfer((char)(address>>8)); //send MSByte address first
spi_transfer((char)(address)); //send LSByte address
//write 128 bytes
for (int I=0;I<128;I++)
{
spi_transfer(buffer[I]); //write data byte
}
digitalWrite(SLAVESELECT,HIGH); //release chip
//wait for eeprom to finish writing
delay(3000);
Serial.print('h',BYTE);
Serial.print('i',BYTE);
Serial.print('
',BYTE);//debug
delay(1000);
}
byte read_eeprom(int EEPROM_address)
{
//READ EEPROM
int data;
digitalWrite(SLAVESELECT,LOW);
spi_transfer(READ); //transmit read opcode
spi_transfer((char)(EEPROM_address>>8)); //send MSByte address first
spi_transfer((char)(EEPROM_address)); //send LSByte address
data = spi_transfer(0xFF); //get data byte
digitalWrite(SLAVESELECT,HIGH); //release chip, signal end transfer
return data;
}
void loop()
{
eeprom_output_data = read_eeprom(address);
Serial.print(eeprom_output_data,DEC);
Serial.print('
',BYTE);
address++;
if (address == 128)
address = 0;
delay(500); //pause for readability
}总结:
1.这里主要以内存器EEPROM为主, 而且个人感觉这里的SPI控制进入到Arduino的开发版, 大体的方向对很多Arduino——SPI控制实用,但毕竟只是一个例子,下面一节将讲述SPI最底层的东西。
2.如果只是简单的读写,Arduino 中是有SPI.h头文件和cpp 也是大家可以研究的一个方向,现在记忆留心还是spi.transfer用法。
二. SPI 深层理解
SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。 SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
假设主机和从机初始化就绪:并且主机的sbuff=0xaa (10101010),从机的sbuff=0x55 (01010101),下面将分步对spi的8个时钟周期的数据情况演示一遍(假设上升沿发送数据)。
---------------------------------------------------
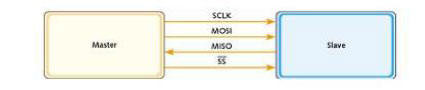
这样就完成了两个寄存器8位的交换,上面的0--1表示上升沿、1--0表示下降沿,sdi、 sdo相对于主机而言的。根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据主机的名准备数据,主机在下一个8位时钟周期才把数据读回来。 SPI总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于 CPU与各种外围器件进行全双工、同步串行通讯。
SPI时序图详解-SPI接口在模式0下输出第一位数据的时刻
SPI接口在模式0下输出第一位数据的时刻
SPI接口有四种不同的数据传输时序,取决于CPOL和CPHL这两位的组合。图1中表现了这四种时序, 时序与CPOL、CPHL的关系也可以从图中看出。
CPOL(时钟极性)和CPHA(时钟相位)意义
CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
CPHA=0,表示数据采样是在第1个边沿,数据发送在第2个边沿
CPHA=1,表示数据采样是在第2个边沿,数据发送在第1个边沿
通过CPOL和CPHA来控制我们主设备的通信模式
发送和接收设备需要根据实际情况分析 (发送设备 ≠ 主设备)
Mode0:CPOL=0,CPHA=0
SCLK(0)空闲;
当SCLK由低到高跳变(上升沿),(接收设备)进行数据的读取;
当SCLK由高到低跳变(下降沿),(发送设备)进行数据的发送;
Mode1:CPOL=0,CPHA=1
SCLK(0)空闲;
当SCLK由高到低跳变(下降沿),(接收设备)进行数据的读取;
当SCLK由低到高跳变(上升沿),(发送设备)进行数据的发送;
Mode2:CPOL=1,CPHA=0
SCLK(1)空闲;
当SCLK由高到低跳变(下降沿),(接收设备)进行数据的读取;
当SCLK由低到高跳变(上升沿),(发送设备)进行数据的发送;
Mode3:CPOL=1,CPHA=1
SCLK(1)空闲;
当SCLK由低到高跳变(上升沿),(接收设备)进行数据的读取;
当SCLK由高到低跳变(下降沿),(发送设备)进行数据的发送;
---------------------

CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0,空闲电平为低电平,CPOL=1时,
空闲电平为高电平。CPHA是用来决定采样时刻的,CPHA=0,在每个周期的第一个时钟沿采样,
CPHA=1,在每个周期的第二个时钟沿采样。
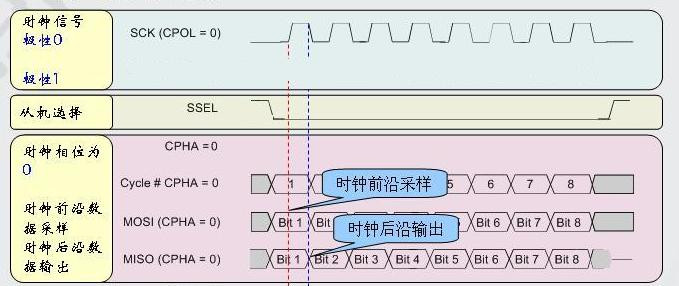
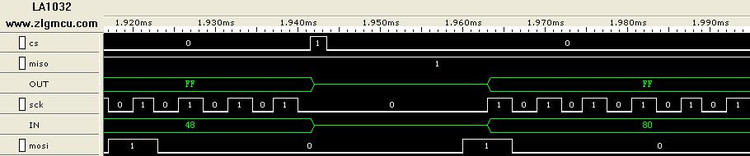
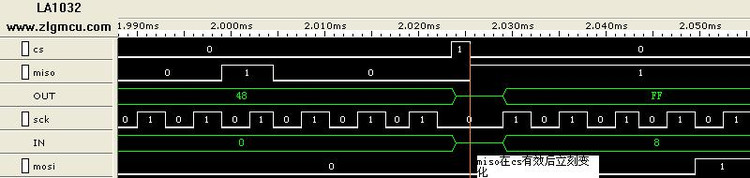
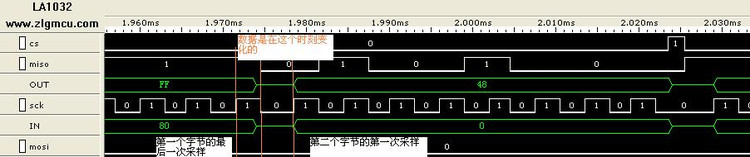
图4中,注意看CS和MISO信号。我们可以看出,CS信号有效后,从器件立刻输出了bit1(值为1)。
通常我们进行的spi操作都是16位的。图5记录了第一个字节和第二个字节间的相互衔接的过程。 第一个字节的最后一位在SCK的上升沿被采样,随后的SCK下降沿,从器件就输出了第二个字节的第一位。
SPI总线协议介绍(接口定义,传输时序)
一、技术性能 SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。 时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。
------------------------------------------------------- 二、接口定义 SPI接口共有4根信号线,分别是:设备选择线、时钟线、串行输出数据线、串行输入数据线。
------------------------------------------------------- 三、内部结构