先将这个package放到工作空间的 src 目录中,
链接:点击打开链接 密码:u98p
然后在工作空间中加入依赖,
rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
并编译
刷新环境
source ~/catkin_ws/devel/setup.bash
1.Gazebo
终端中运行:
roslaunch robot_sim_demo robot_spawn.launch
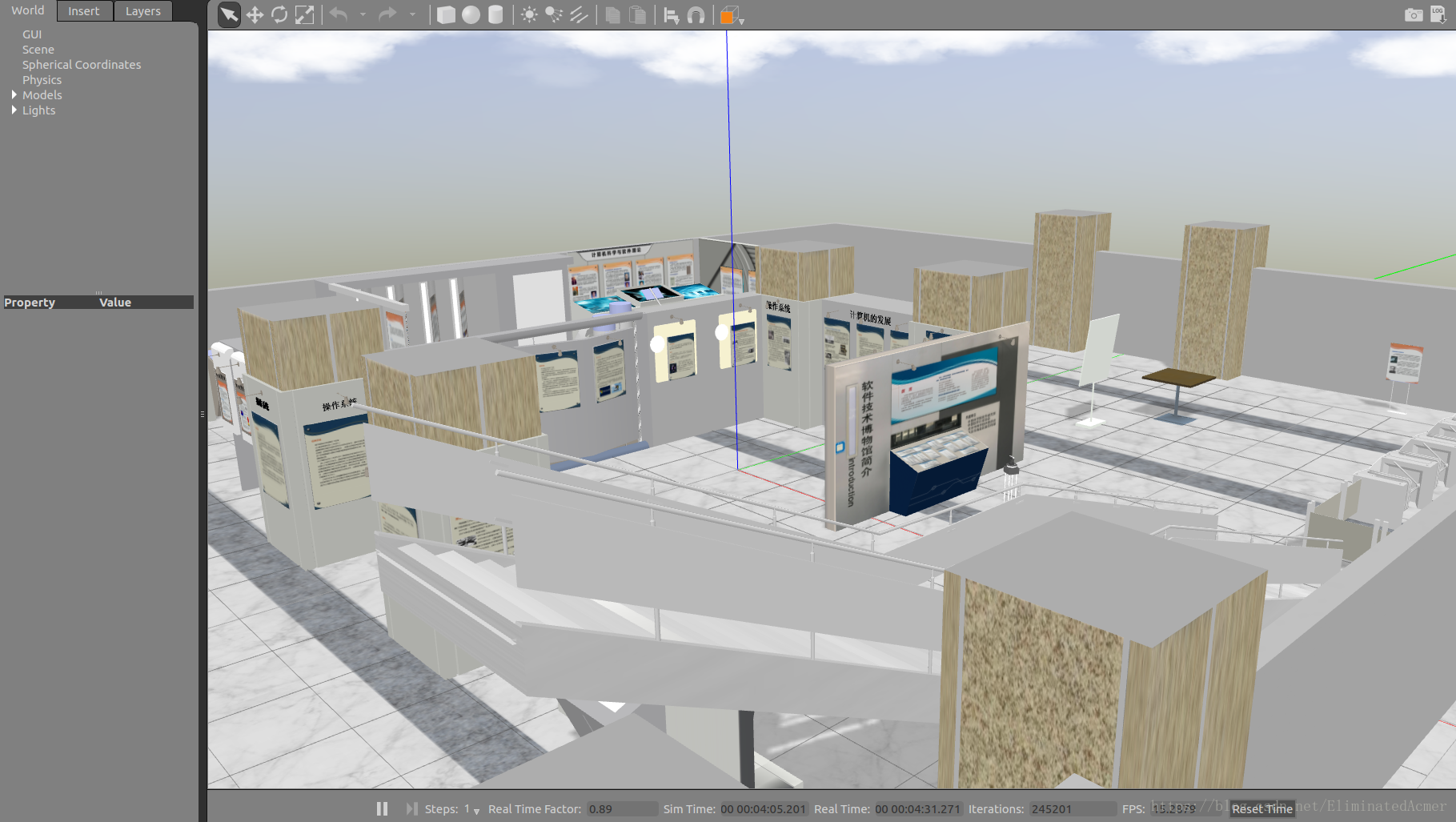
左上角的 world 可以看到一些物体的属性,insert 是添加一些模型,比如咖啡桌等等,联网状态可以下载很多模型
2.RVIZ
先启动 Gazebo,再新开一个终端,输入
rviz
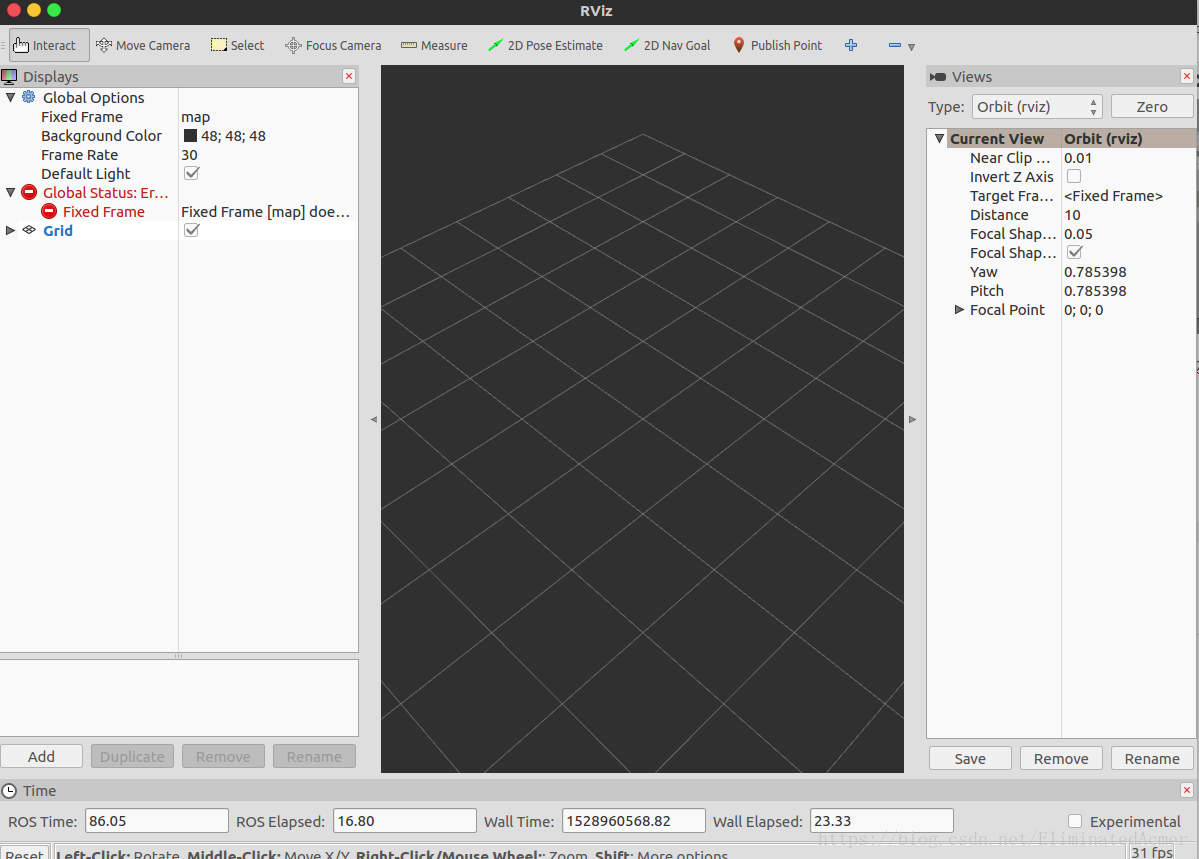
点击左下角的 Add,添加一个机器人
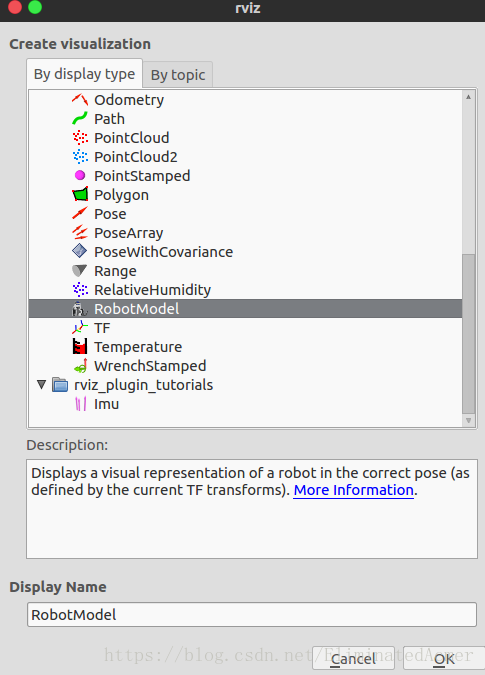
发现机器人和 Gazebo 中的有差别
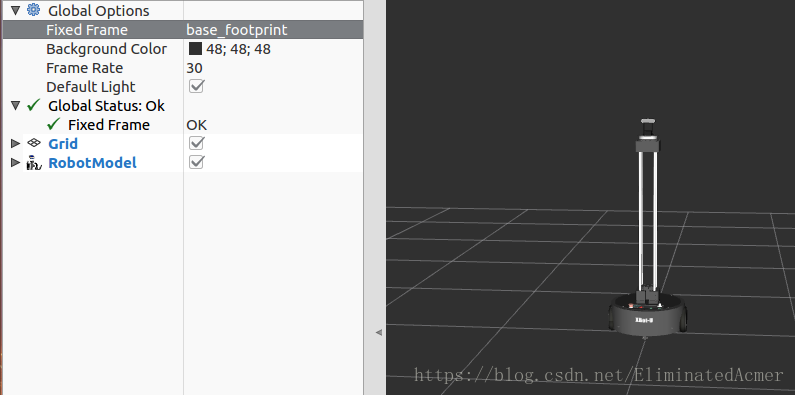
这时需要调整 Fixed Frame
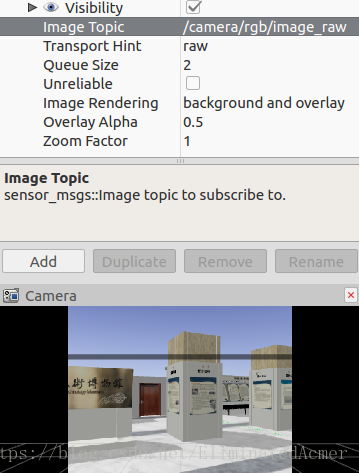
添加一个相机
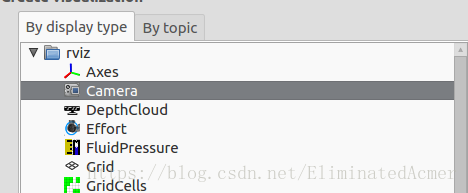
需要检测 Gazebo 中的画面,调整 Image Topic
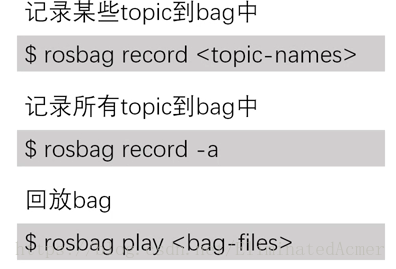
3.rosbag
记录和回放数据流
启动 Gazebo,新开一个终端
rosbag record /camera/rgb/image_raw
用于监听一个摄像头的消息
运行这个节点
rosrun robot_sim_demo robot_keyboard_teleop.py
可以让机器人在你按下
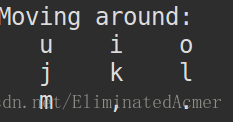
的时候进行移动,每移动一次,按下q
可以看到

终止进程,关闭 Gazebo,准备回放
rosbag play 2018-06-14-16-01-52.bag
由于它是一个单独的节点,因此先运行master
roscore
可以看到:
当然也可以使用
rosrun image_view image_view image:=/camera/rgb/image_raw
观看当时摄像头记录下来的图像
4.rqt
之前已经介绍过了,因此不再赘述:点击打开链接