时隔两年 又借到了之前的那个激光雷达,最老版本的思岚A1,甚至不支持新的固件,并且转接板也不见了,看了下淘宝店卖¥80,但是官方提供了一个基于STM32的实现方式,于是我估摸着这个转接板只是一个普通的USB-TTL转接板,那我就用340搭一个试试吧
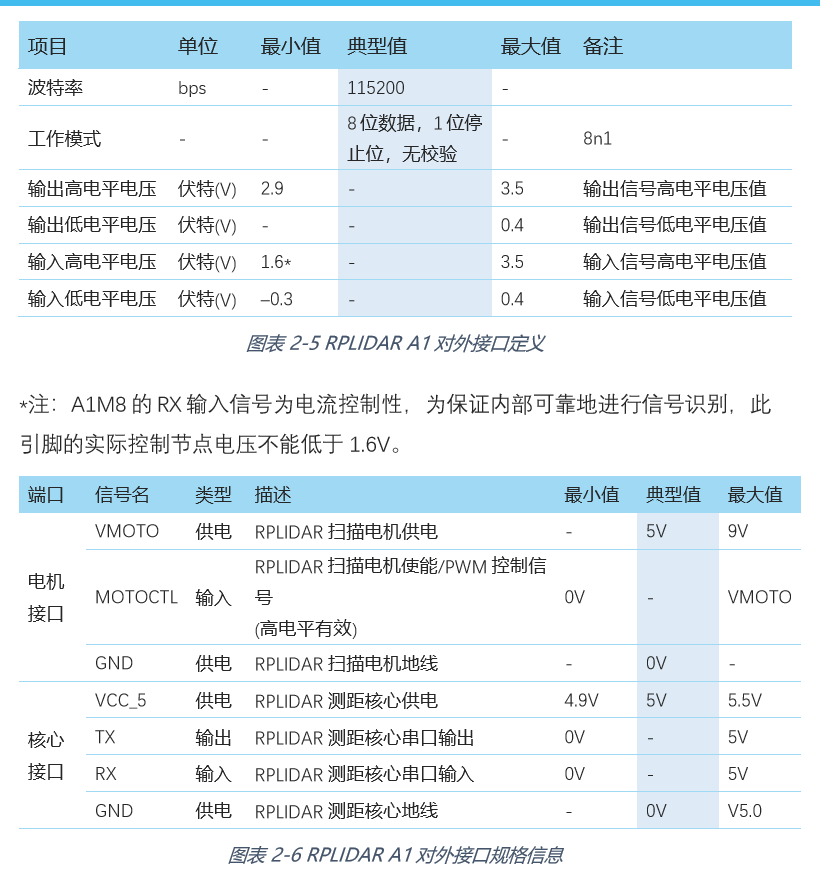
根据官方的datasheet,电机可以5V供电,核心也是5V,电机使能是VMOTO电压,即5V,因此将三个接口焊到一起,两个地焊到一起,然后剩下一组TXRX,因此七个接口变成四个接口了,正好能接上340,于是插上电试了试,当然。。。没有那么顺利,报错,连接不上设备
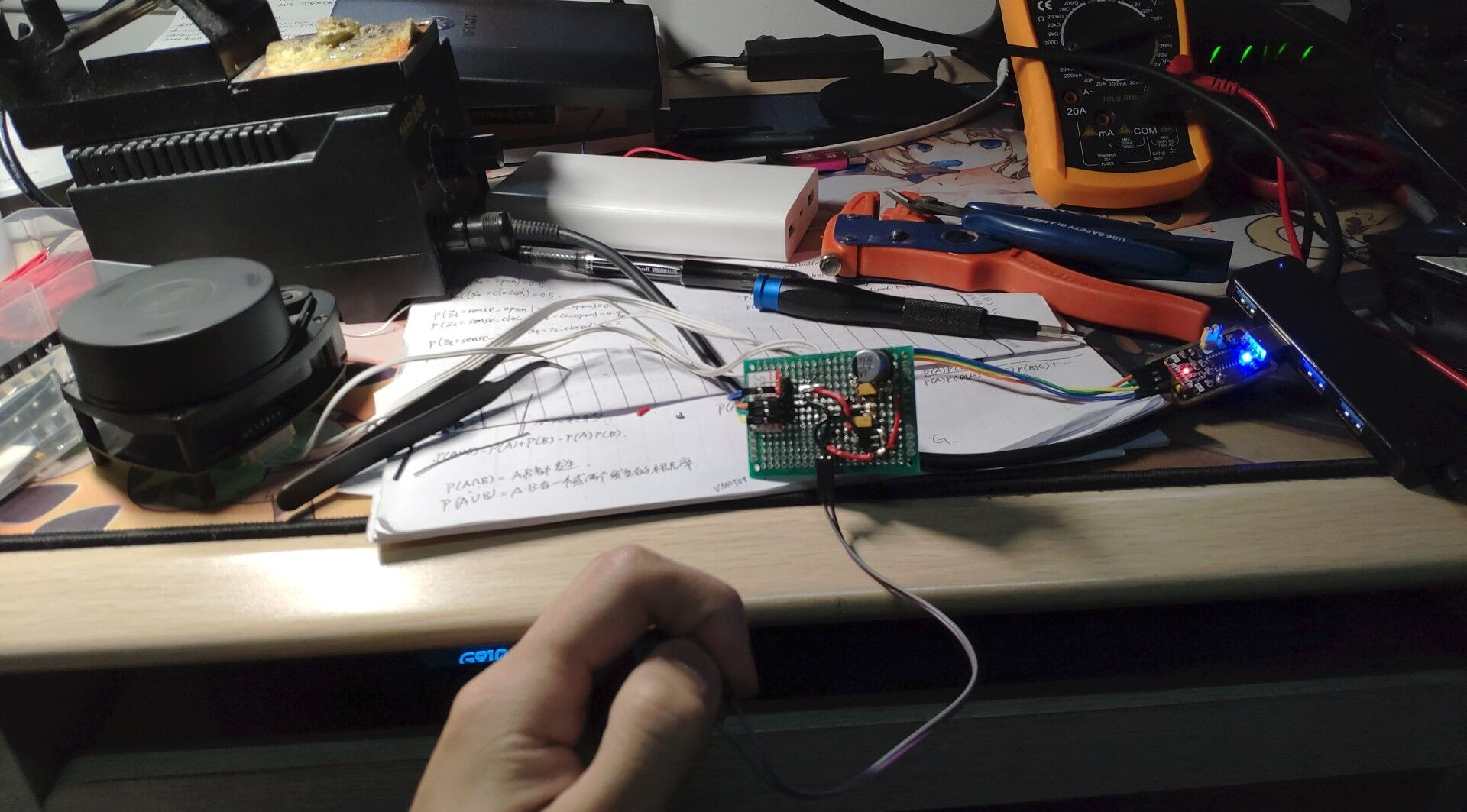
于是开始检查连接问题,突然发现转接板的TX和雷达的TX没有导通,原来之前的那个转接口接触不良,于是重新焊了一个洞洞板来转接,这次能连接上了,但是没法开始扫描,不过想起了两年前调试的时候写过调试日志,当时好像也遇到了类似的问题
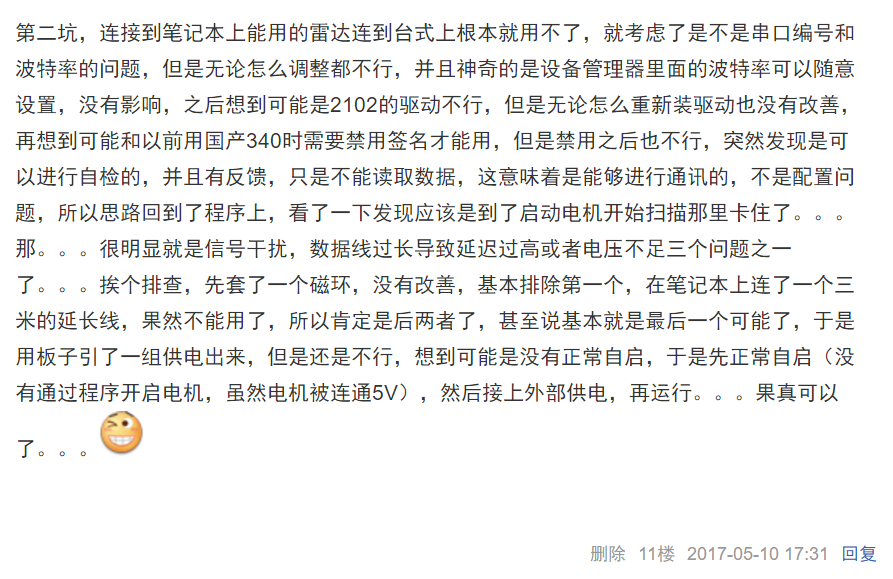
看来这就是写日志的好处啊,于是测量了电压,发现只有4.5V,USB的压降太严重,而datasheet里面核心电压最低需要4.9V,我增加了一个USB供电也只能提到4.7V,虽然不记得之前那个外部供电是什么提供的了,但是反正这个转接板还有点空间,那就加个AMS来降压,外接一个之前在达普买的可充电9V电池,焊好之后通电,看着AMS上飘起的缕缕青烟,我知道白干了,换了个AMS之后改了下正负极,然后加了一个TVS,这下搞定了,正常运行!开启方式为先用USB-TTL接上电脑,然后再外接电源提高电压,然后就能正常启动了,只是不知道这样对设备有没有损伤,有空可以打片PCB回来做个小点的转接板,也比官方的板便宜(逃
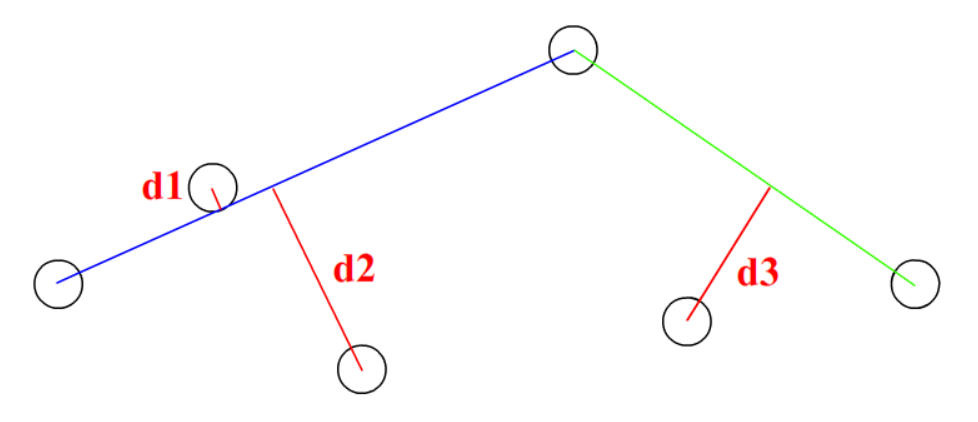
然后就是Ramer-Douglas-Peucker算法的实现,其实原理非常简单,就是先根据较大的阈值将点集分隔开成几个小的集合,然后以每个集合的最边上两侧的点为端点并连线,计算中间每个点到这个线段的距离(d1...dn),然后取最远的点(d3),如果最远的距离大于阈值,则细分为两个集合,然后重复之前的步骤
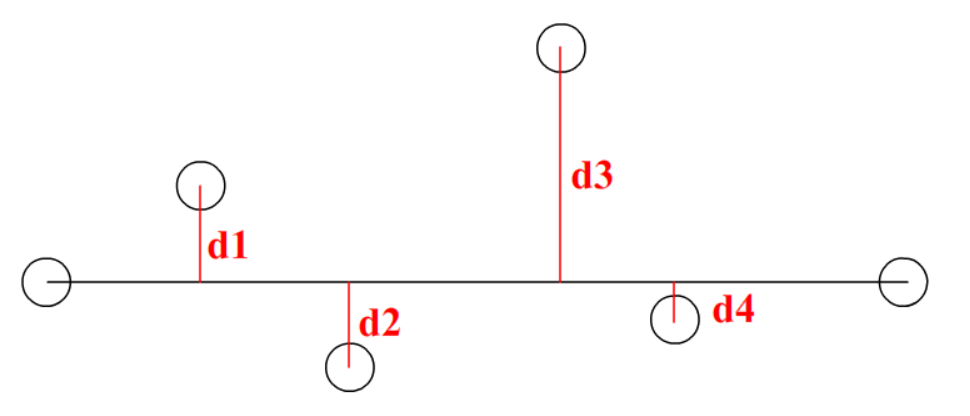
可以得到蓝色和绿色两个子集,然后分别有d1、d2和d3距离,如果每个子集的最大值(d2和d3)超过阈值,对每个子集重复之前的步骤,
然后就是程序的实现了,这是两年前写的程序,当时用的是OpenGL库,这个库相对于OpenCV更加轻量,并且不需要配置系统环境,只用在VS里面添加include和lib目录即可,雷达的sdk需要添加include、lib目录和附加依赖项,sdk可以从官网下载,并且只能用32位!!!64位会报错,可能可以修改部分代码实现,但是暂时没有这个打算
代码依旧托管于Github,不过因为是老程序了,没有补充很多注释,并且算法表达也不够简明,新版分割算法可以参考Github里面LSD下的myRDP程序
https://github.com/Pyrokine/RamerDouglasPeucker17