1、ROS安装时出现 “无法获得锁的解决方法”
参考:https://www.jianshu.com/p/6868ed4b4aec
2、运行rviz时
要先在一个终端窗口运行roscore
3、虚拟机中的操作系统如何全屏显示
参考:https://blog.csdn.net/yiran9741/article/details/52904755/
https://jingyan.baidu.com/article/ab69b2706698e72ca7189f0a.html
4、7.2 发布者节点和订阅者节点的创建和运行
在catkin_make(执行catkin构建)时发生错误
原因是:CMakeLists.txt中的内容弄错了,直接复制教材里的代码就行,不用添加其他内容。
5、ROS工具
rviz和gazebo的介绍
参考:https://www.zhihu.com/question/268658280/answer/340190866
6、roscore出现错误ROS-debug1 : 运行roscore时报错:Unable to contact my own server at...
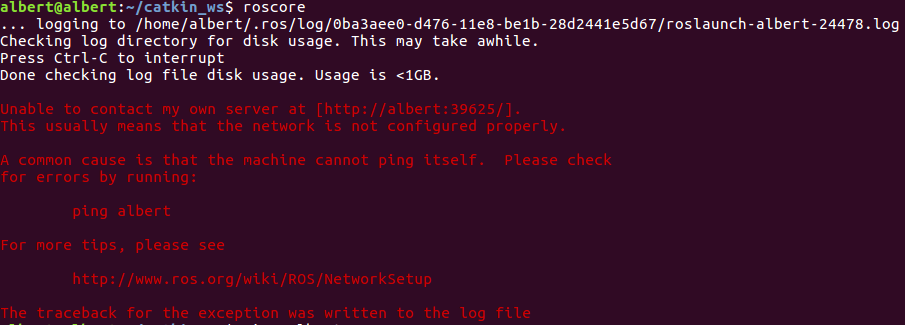
解决方法:
参考:https://www.cnblogs.com/yanqingyang/p/9823527.html
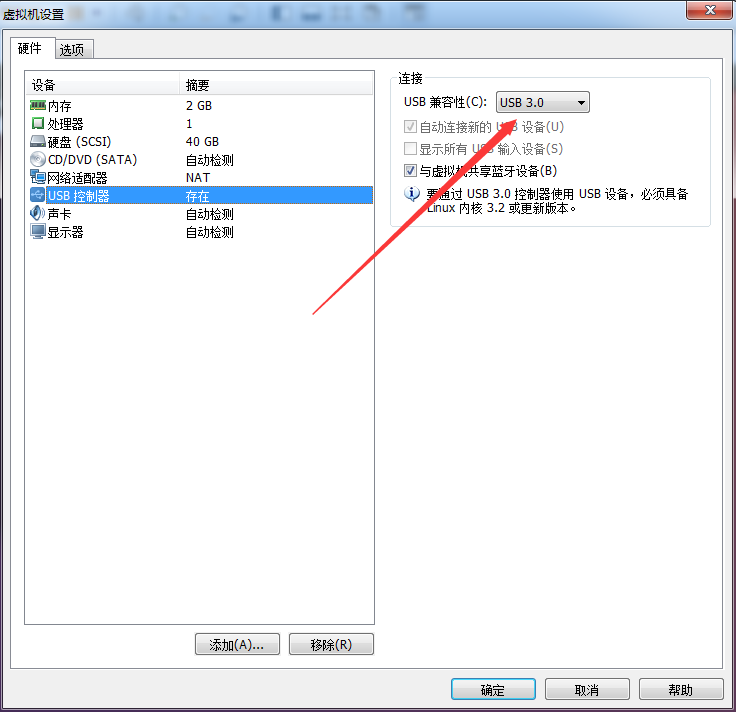
7、使用摄像头出现timeout
1)修改USB调成3.0
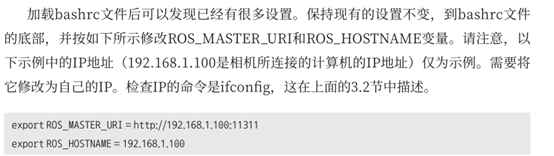
2)修改
gedit ~/.bashrc
source ~/.bashrc
7、ROS常用指令
roscore 开启主节点
roscd roscd + 直接加包的名字 例:roscd roscpp
cd cd + 完整路径 例:cd /opt/ros/indigo/share/roscpp
cd .. 返回上一级目录
cd ~ 返回到home目录
mkdir mkdir命令用来创建目录
gedit 用gedit打开某个文件
source 刷新工作空间的环境
sudo 以系统管理者的身份执行指令
sudo apt-get install 软件包名称 安装这个软件包
echo 显示字符串
rosrun [功能包名称] [节点名称] 执行指定的功能包中的一个节点
roslaunch [功能包名称] [launch文件名] 运行多个ros节点 (注意:使用roslaunch时,不用开roscore主节点)
8、如何使Ubuntu界面满屏
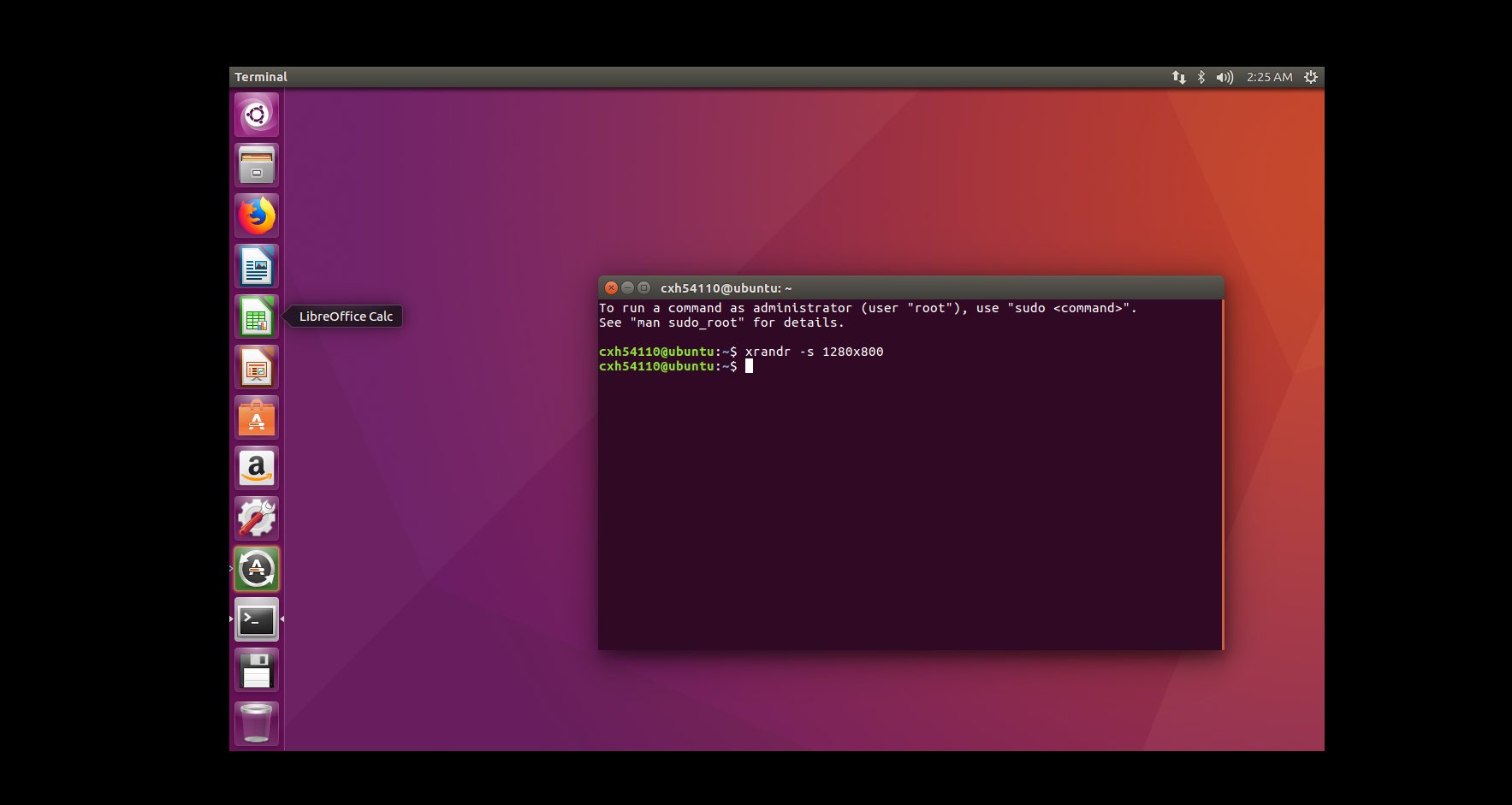
在命令框中输入:
xrandr -s 1920x1440