调试ABB机器人输送带跟踪需要注意的事项:
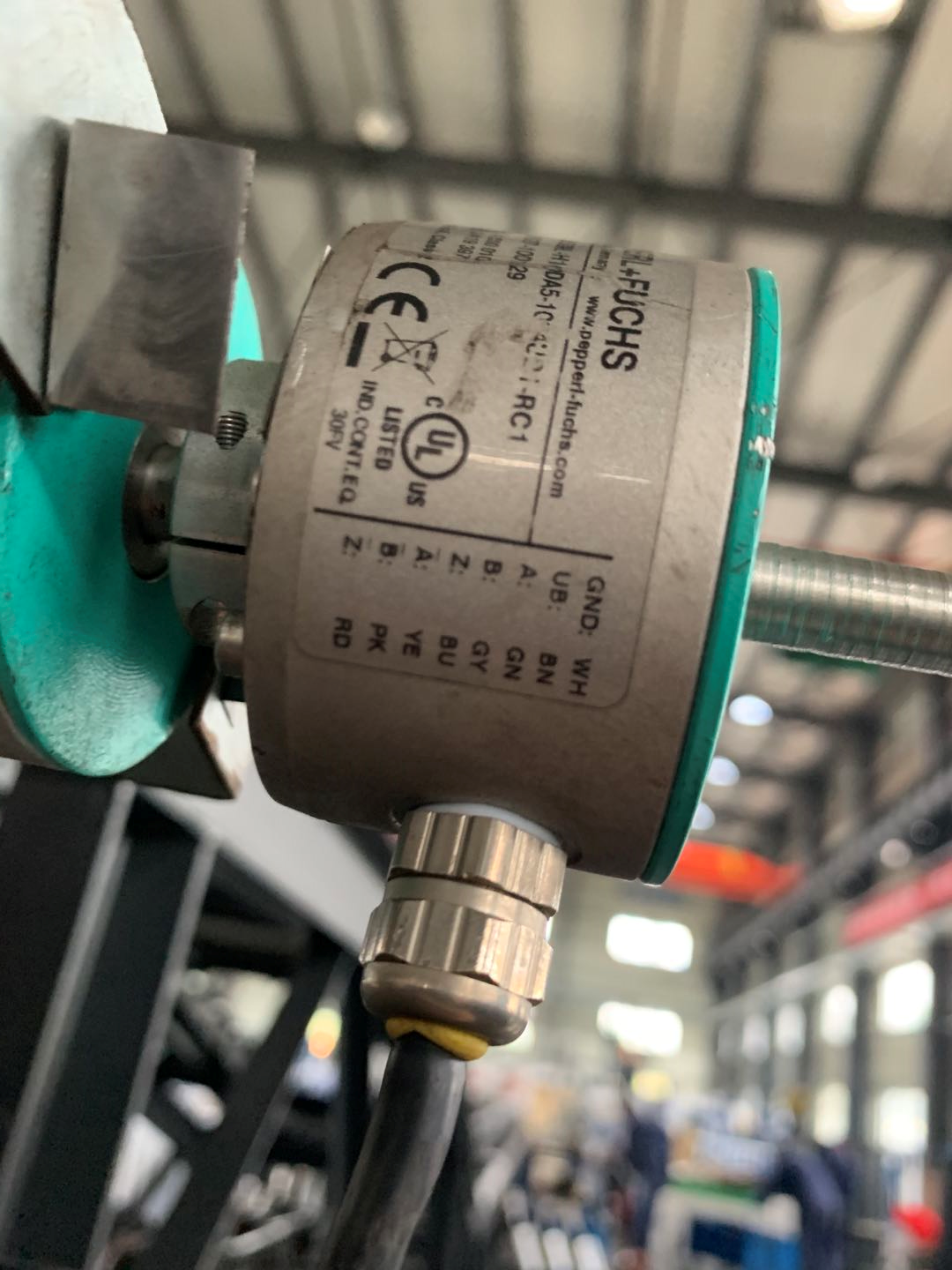
编码器要求:
电压:10-30v
电流:50-100mA
相位:AB相、相位差90度
输出:PNP型编码器
机器人板卡:377B板卡
机器人选项:606-1 Converyor Tracking
板卡端口接线: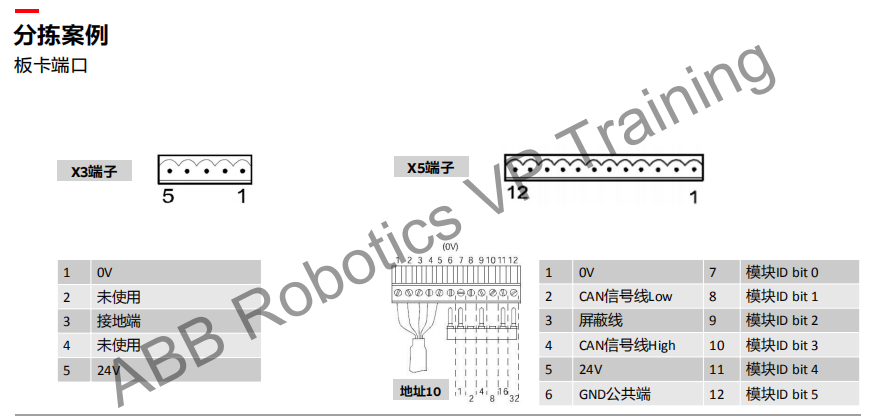

编码器示例:其中A、B为编码器相位,GND、UB分别为0v、24v电源线,后面对应为线的颜色;
接触开关示例:两线制接板卡X20上24v和信号线,三线制按照板卡对应即可;

线路接完之后调试须知





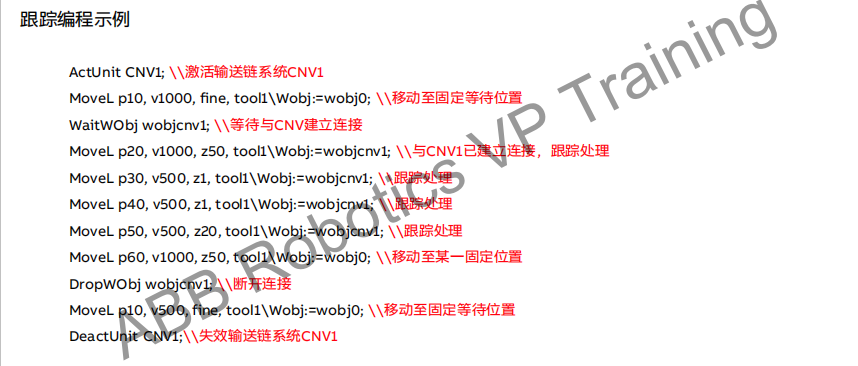
运行程序及IO介绍:

调试过程中出现错误处理方法:
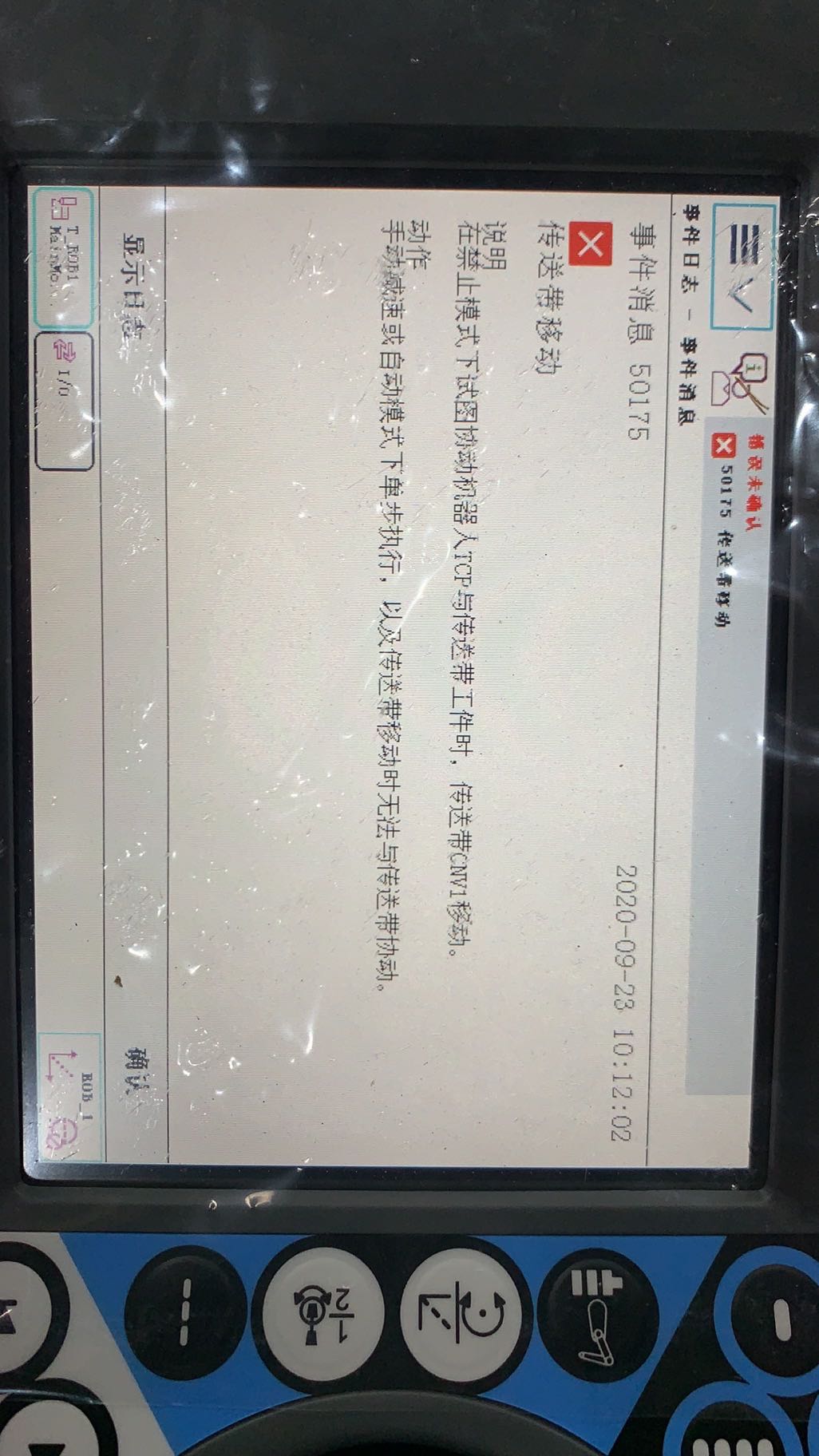
这个问题大多是机器人速度跟不上输送链速度而导致的报错,解决方法为使用手动全速和自动运行程序,可以在输送带动起来后观察C1speed这个模拟量的值(单位为m/s)对比程序运行速度;
如果在过程中遇到其他问题也可留言,一起讨论一起进步;